OS-2.3 同步和互斥
同步和互斥
进程同步,进程互斥
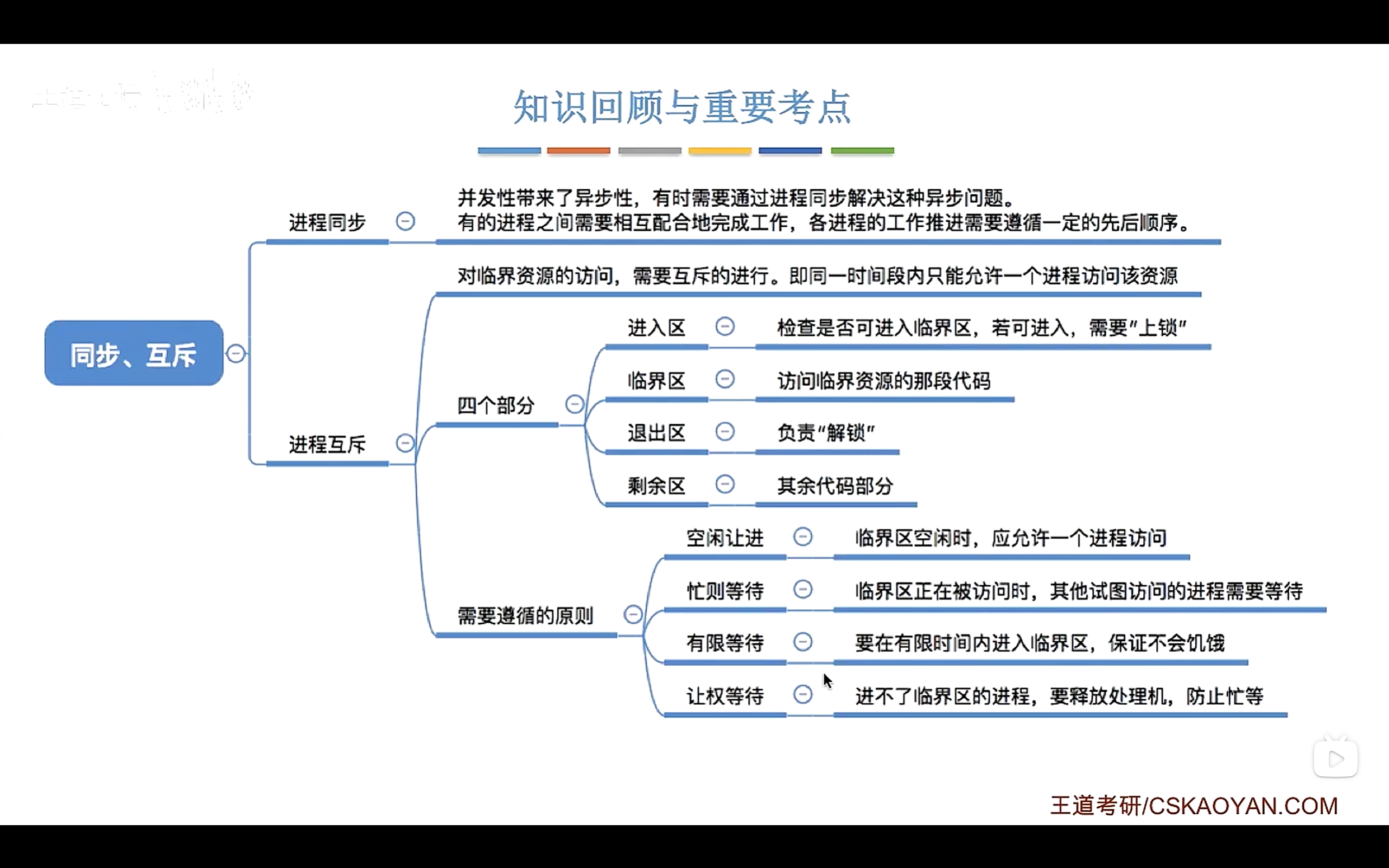
①进程同步:解决进程的异步问题,协调工作顺序。
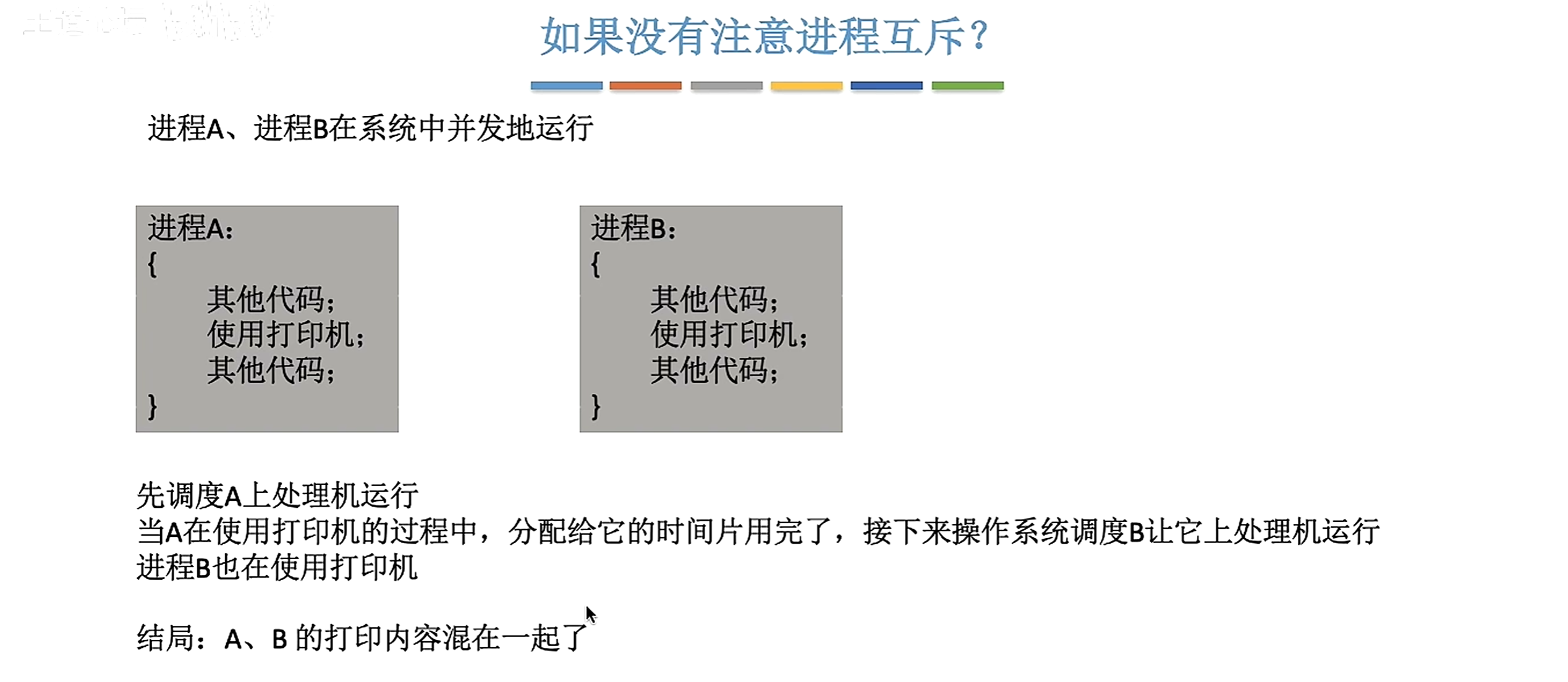
②进程互斥对于临界资源,必须互斥地进行访问。
临界资源(临界区):一个时间段内只允许一个进程使用的资源。
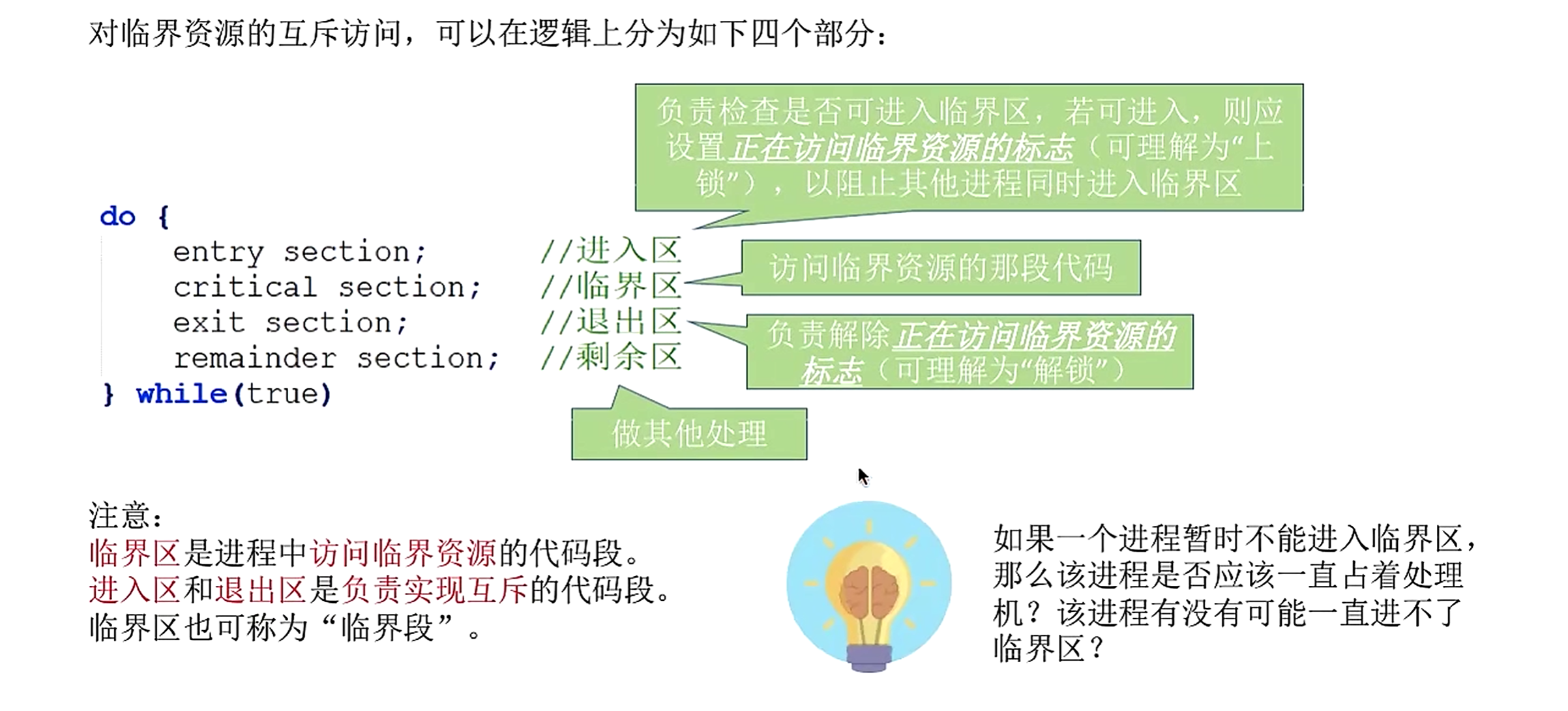
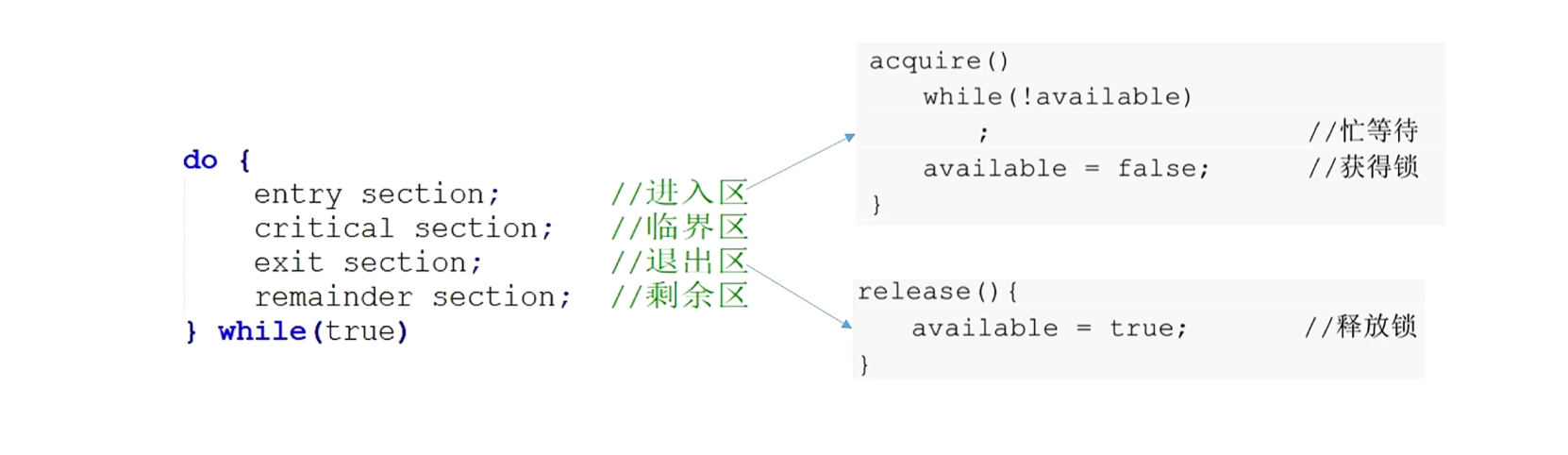
实现互斥的四个逻辑部分:
进入区。临界区。退出区。剩余区。
实现互斥遵循的四个原则:
空闲让进。忙则等待。有限等待。让权等待。

回顾
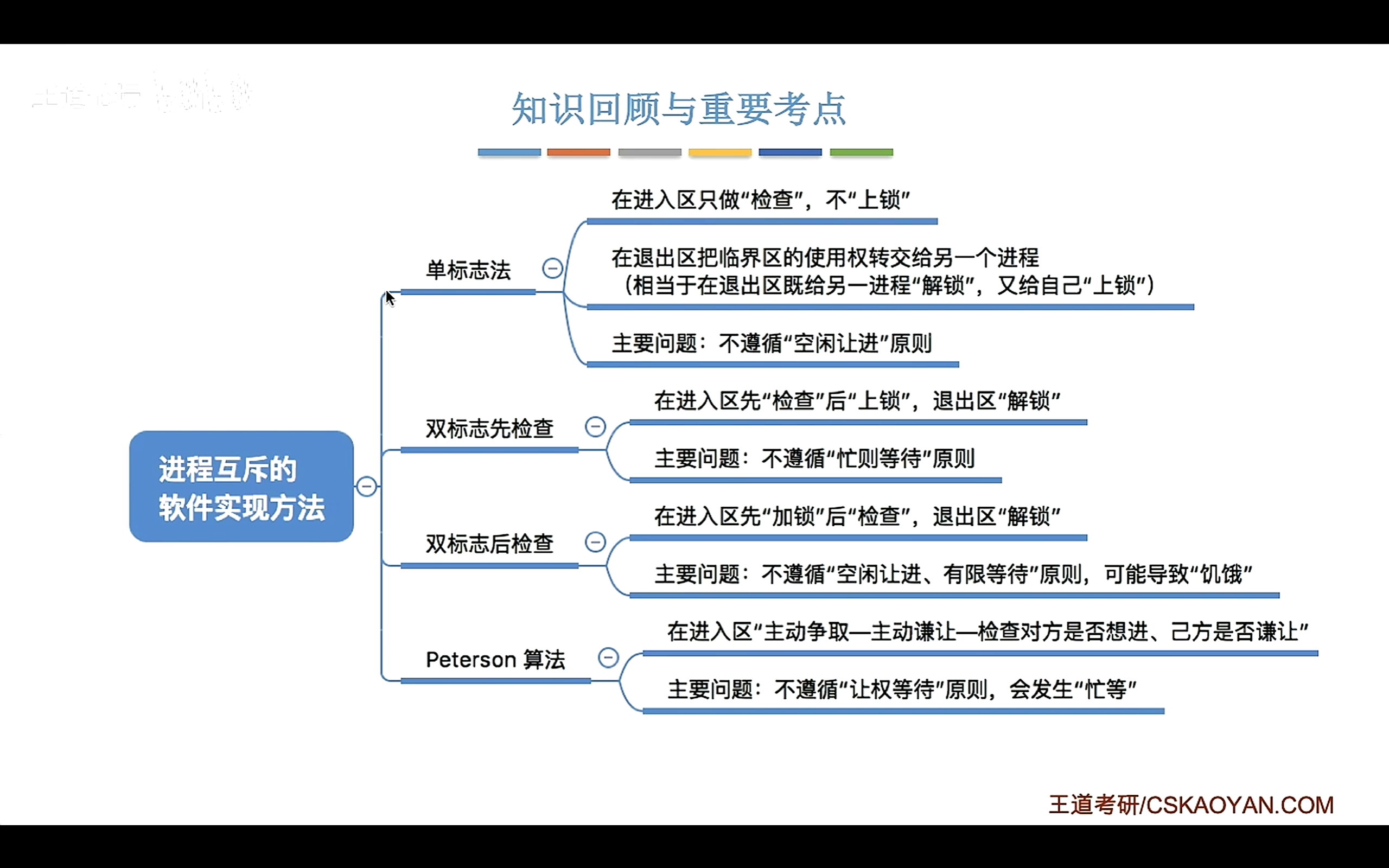
进程互斥的软件实现方法
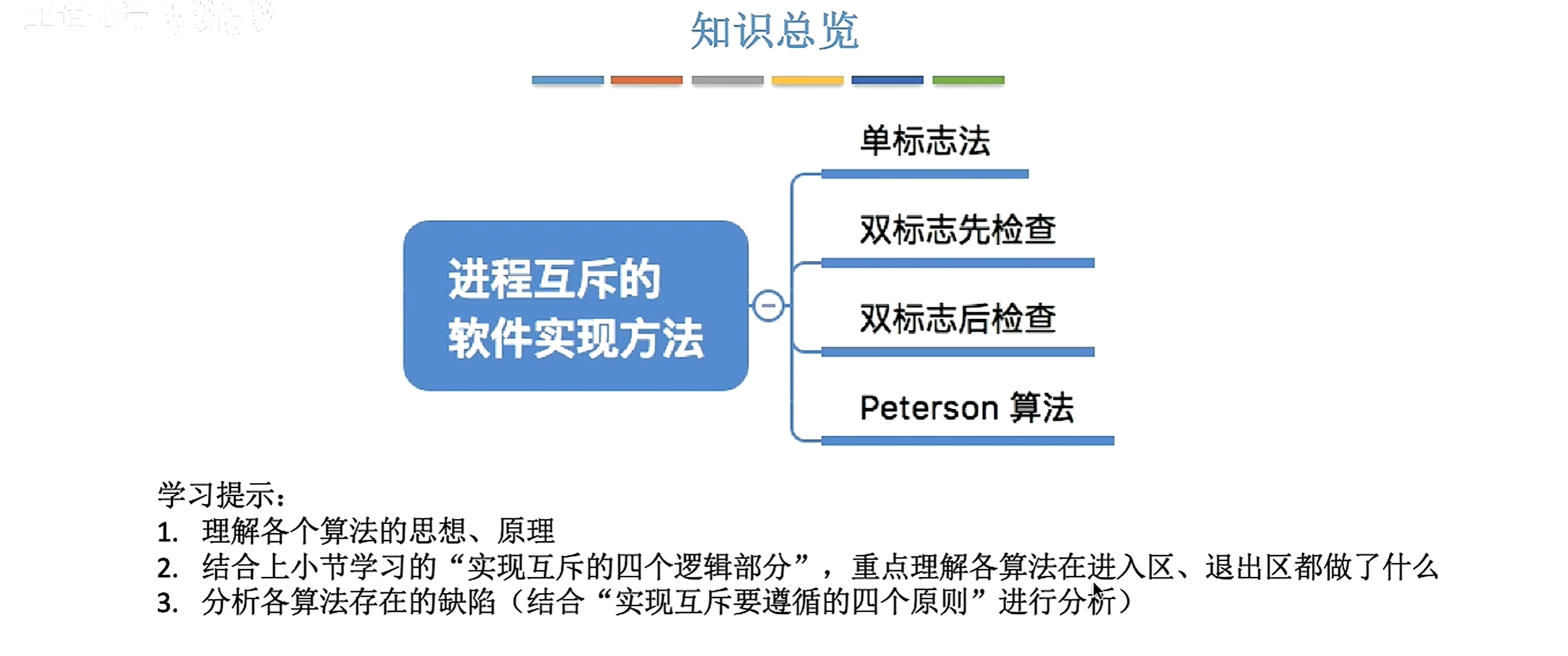
①单标志法
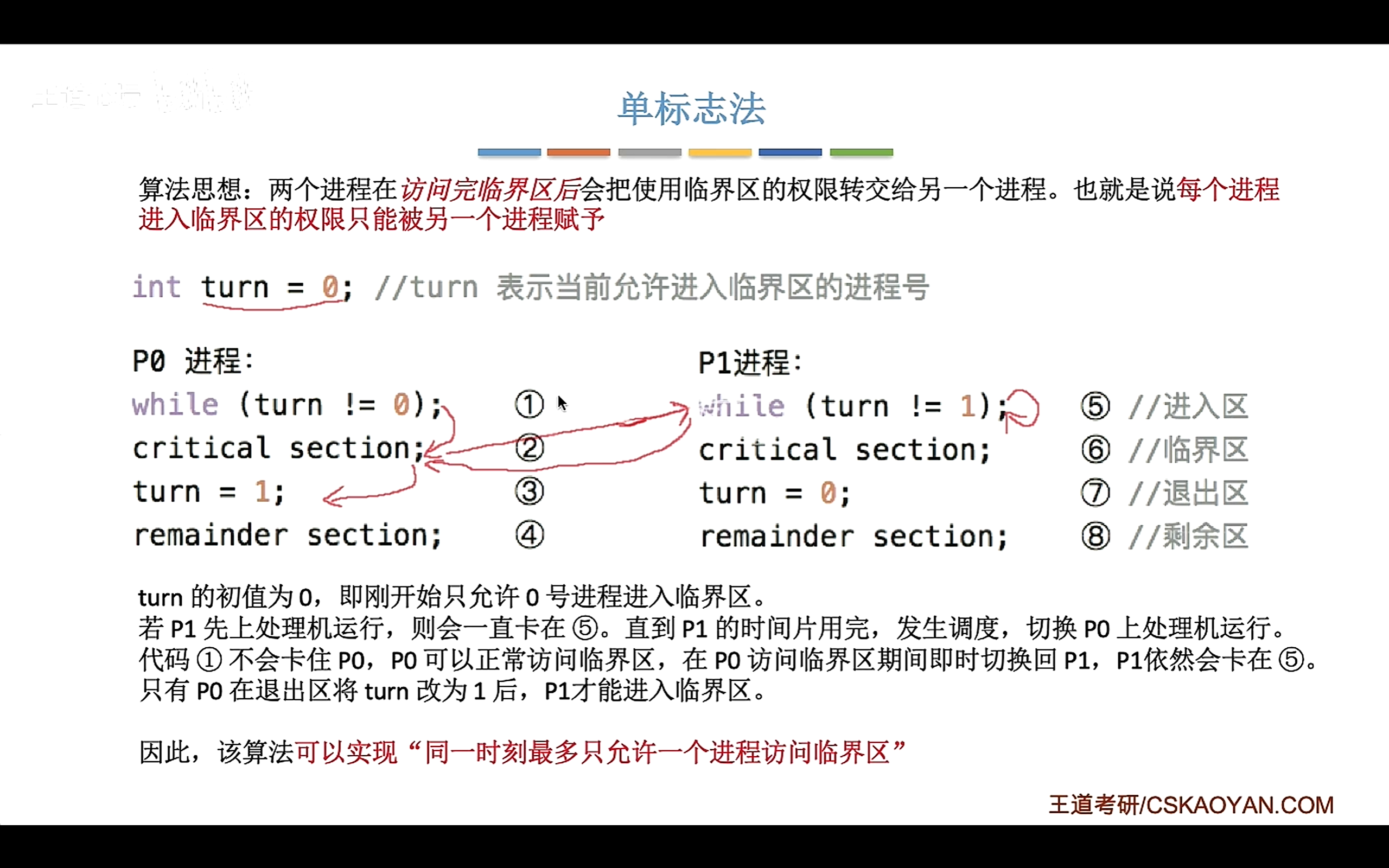
缺点:允许进入临界区的进程P0不访问临界区,此时临界区空闲,但是别的进程如P1使用不了临界区。

②双标志先检查法
先“检查”后“上锁”
先检查对方想不想使用(检查)
对方不想使用的话,自己要用(表达意愿,上锁)
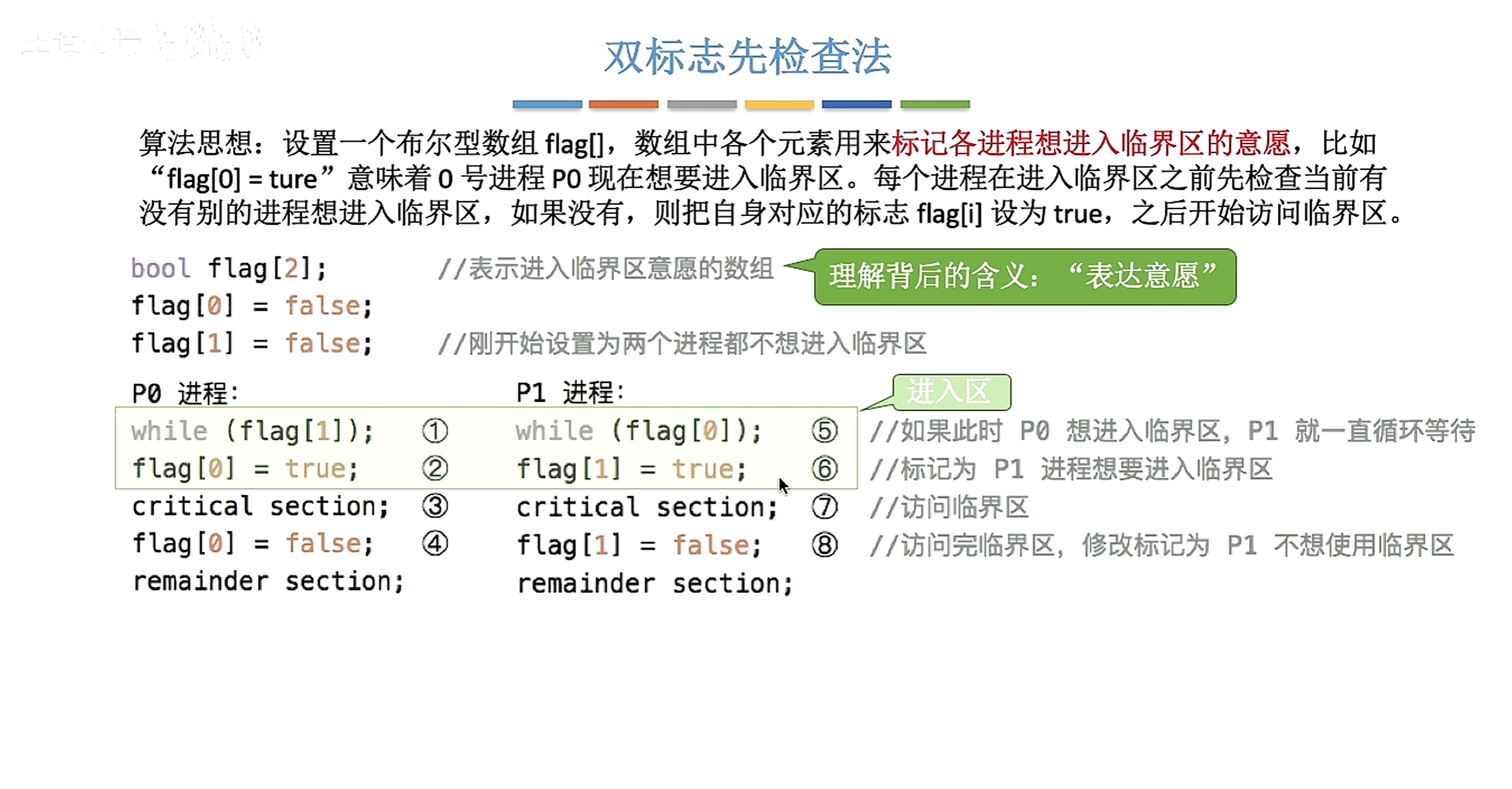
缺点:
如果两个进程是,并发的运行(时间片切换),【1-5-6-7,后切换2-3】会造成两个进程P1P2同时使用临界区。

③双标志后检查法
先“上锁”后“检查”。
自己想用临界资源(表达意愿,上锁)
自己不想再问对方。(检查)
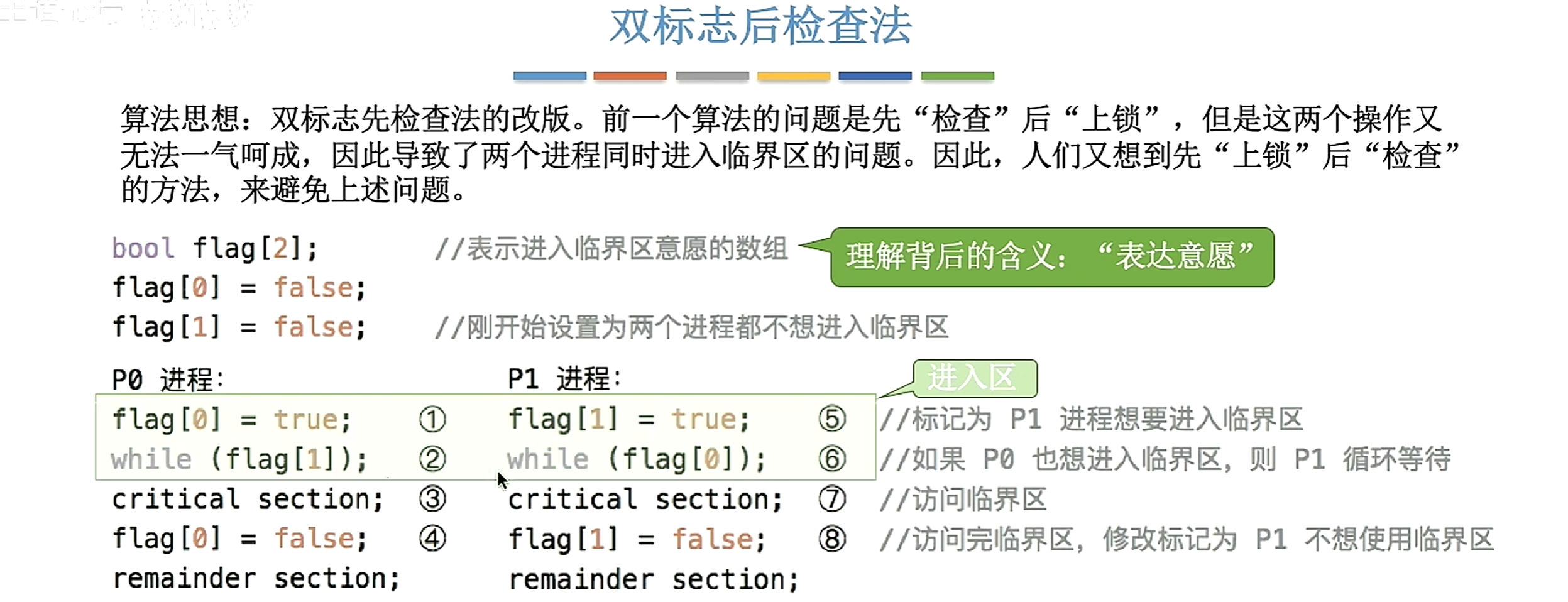
缺点:
并发运行,两个进程都访问不了临界区。【1-5-2-6-wait…】

④peterson 算法
1.主动争取
2.主动谦让
3.如果对方也想使用。且是最后一次是自己说了客气话,则让对方进入临界区。
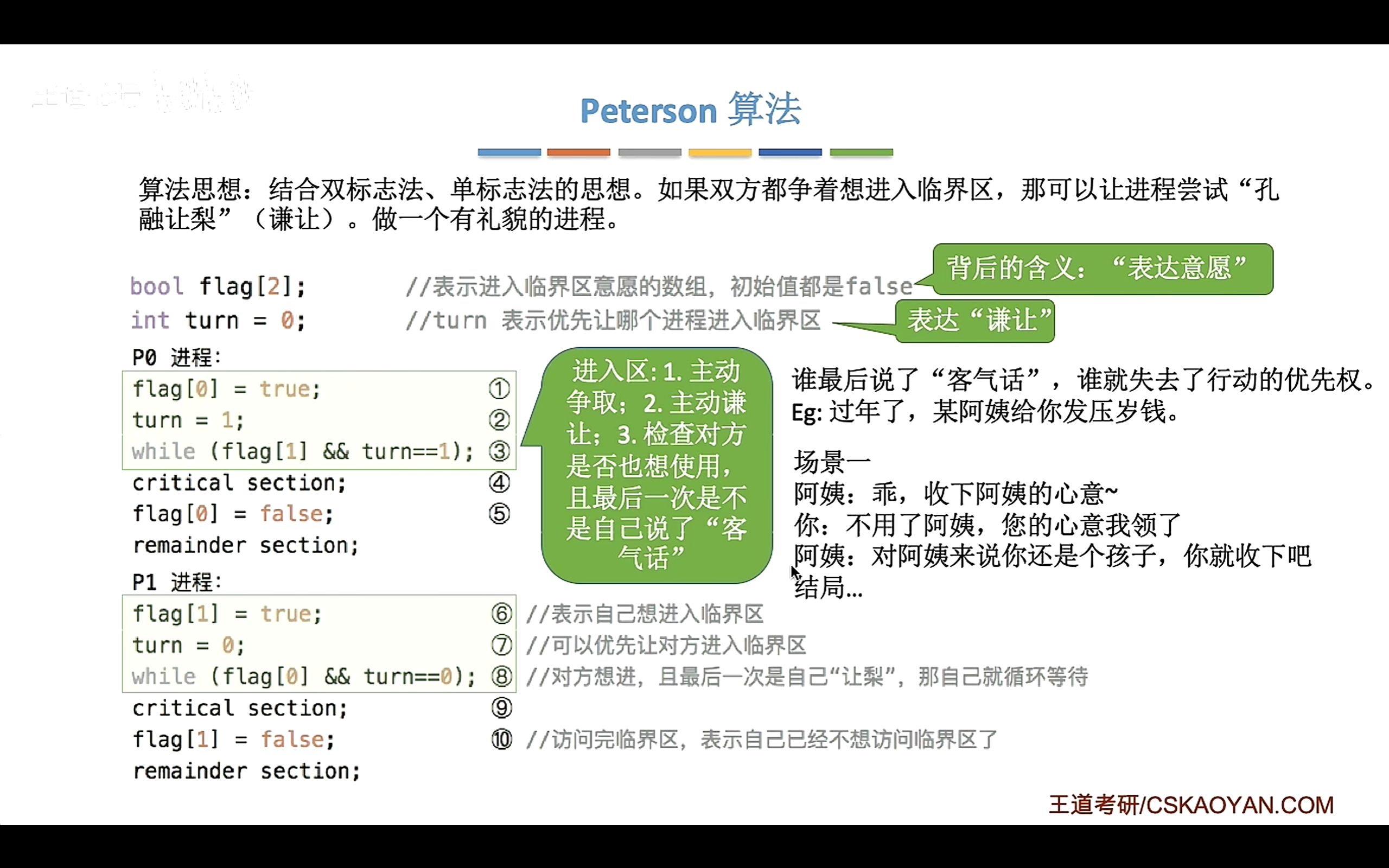
优点:遵循了空闲让进,忙则等待,有限等待三个原则。
缺点:没有遵循让权等待的原则。
回顾
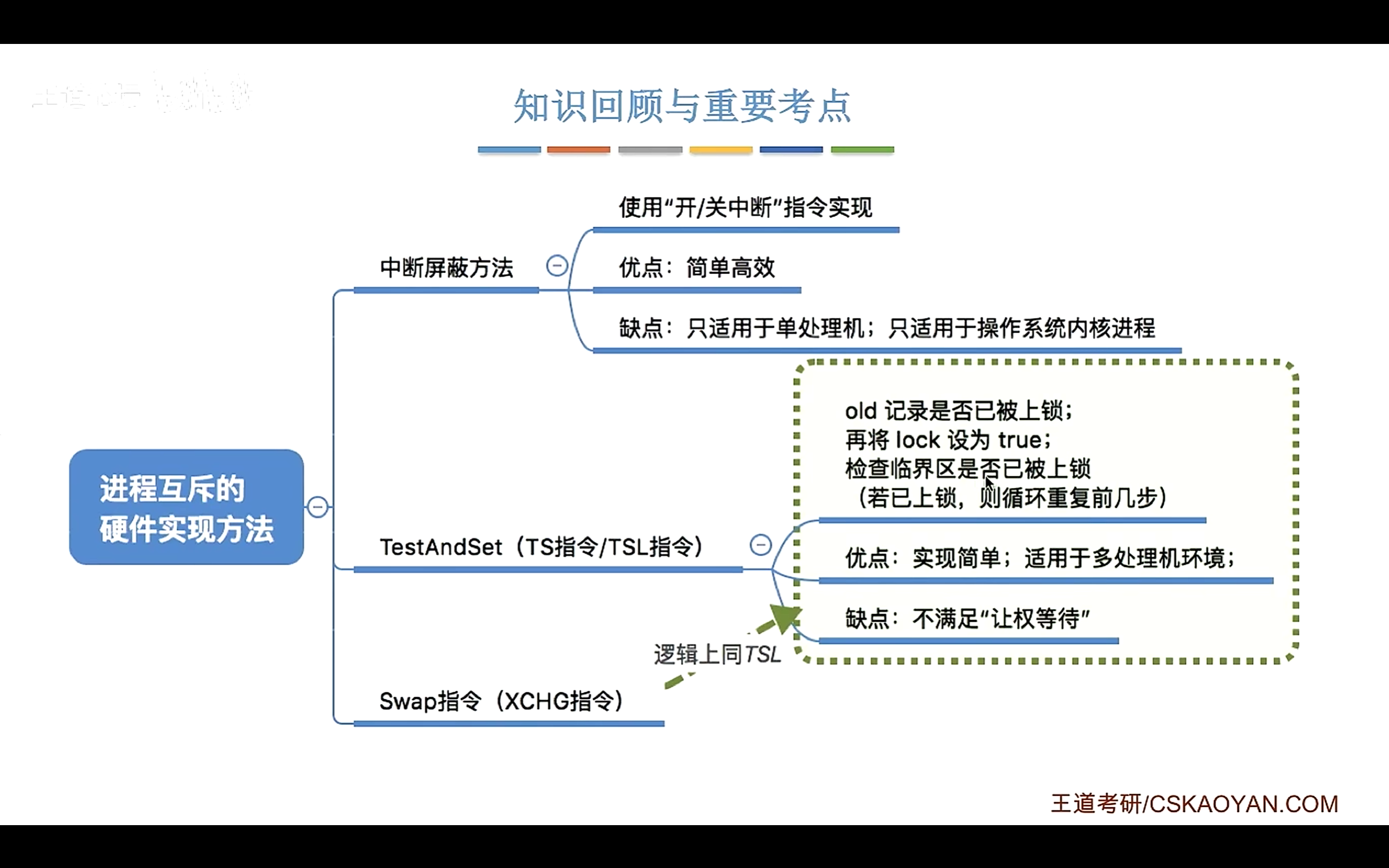
进程互斥的硬件实现方法
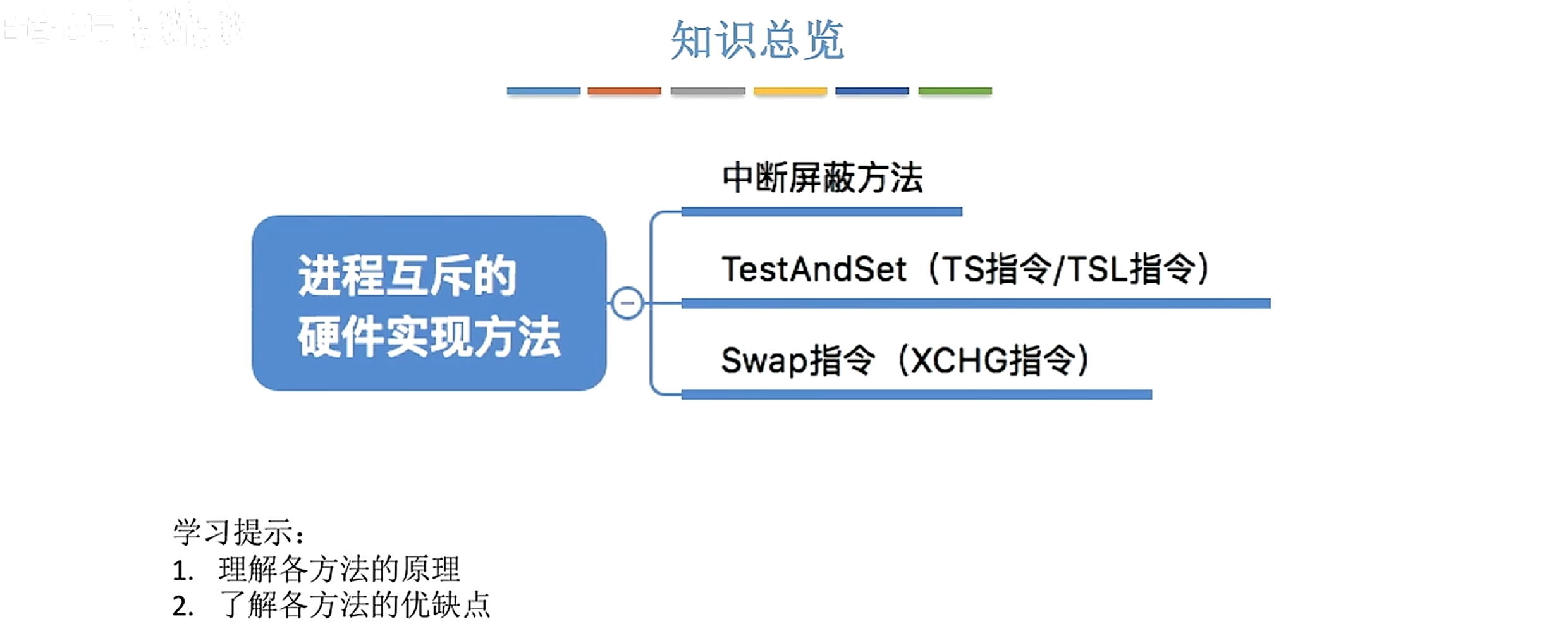
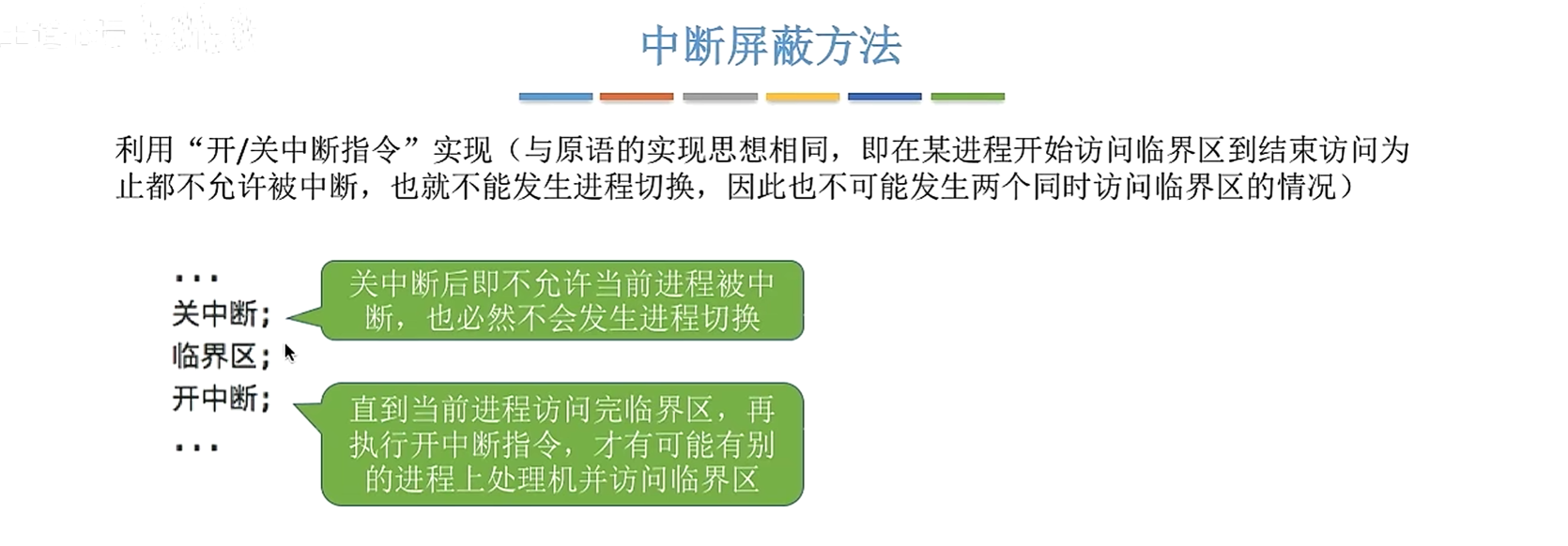
①中断屏蔽方法
优点:简单,高效
缺点:不适合多处理机。只适用于OS内核进程。(开/关中断指令只能运行在内核态,给用户随意使用很危险)
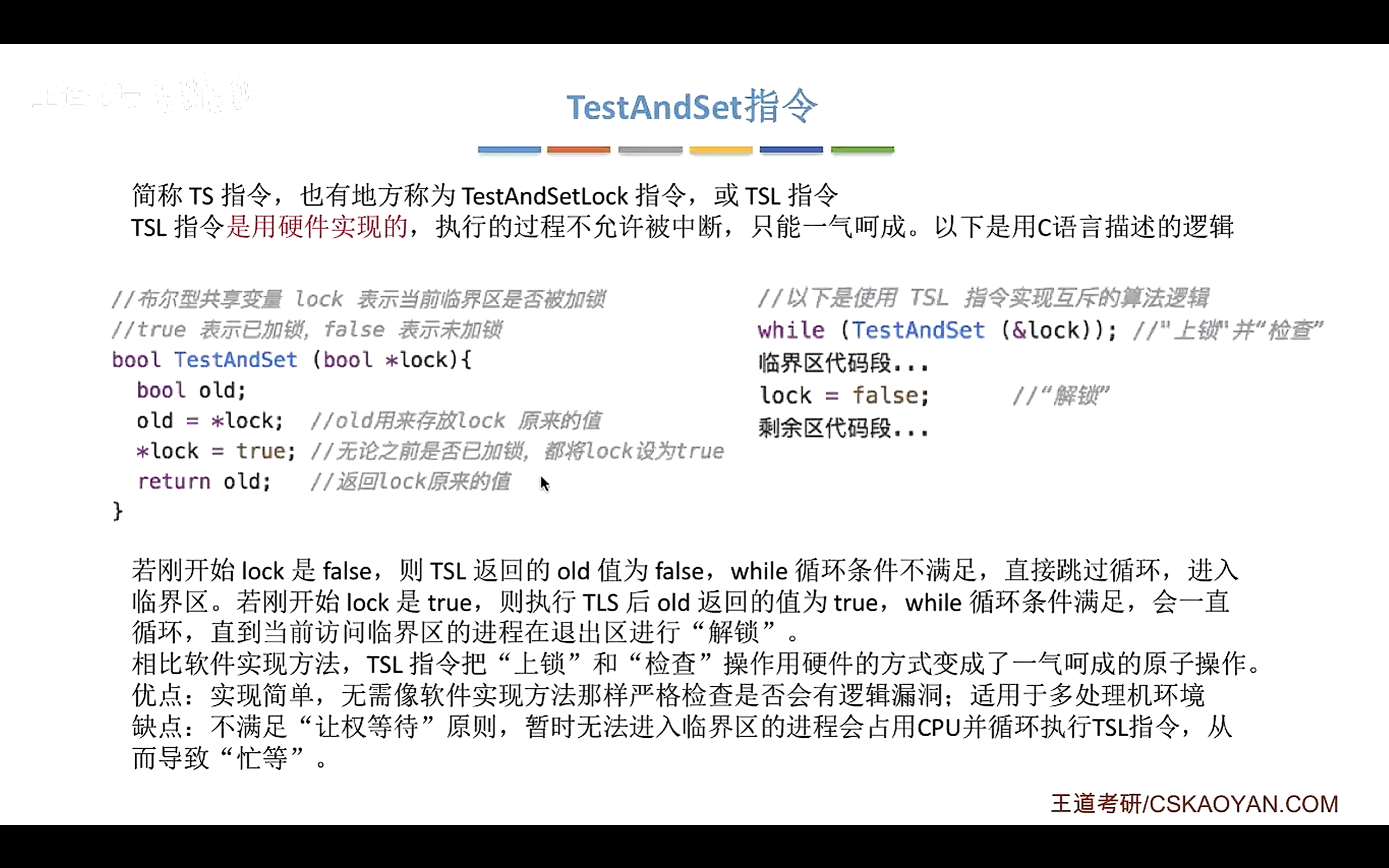
②TestAndSet指令
TSL指令,硬件实现的,执行间不能被打断。
检查与上锁是一体的。
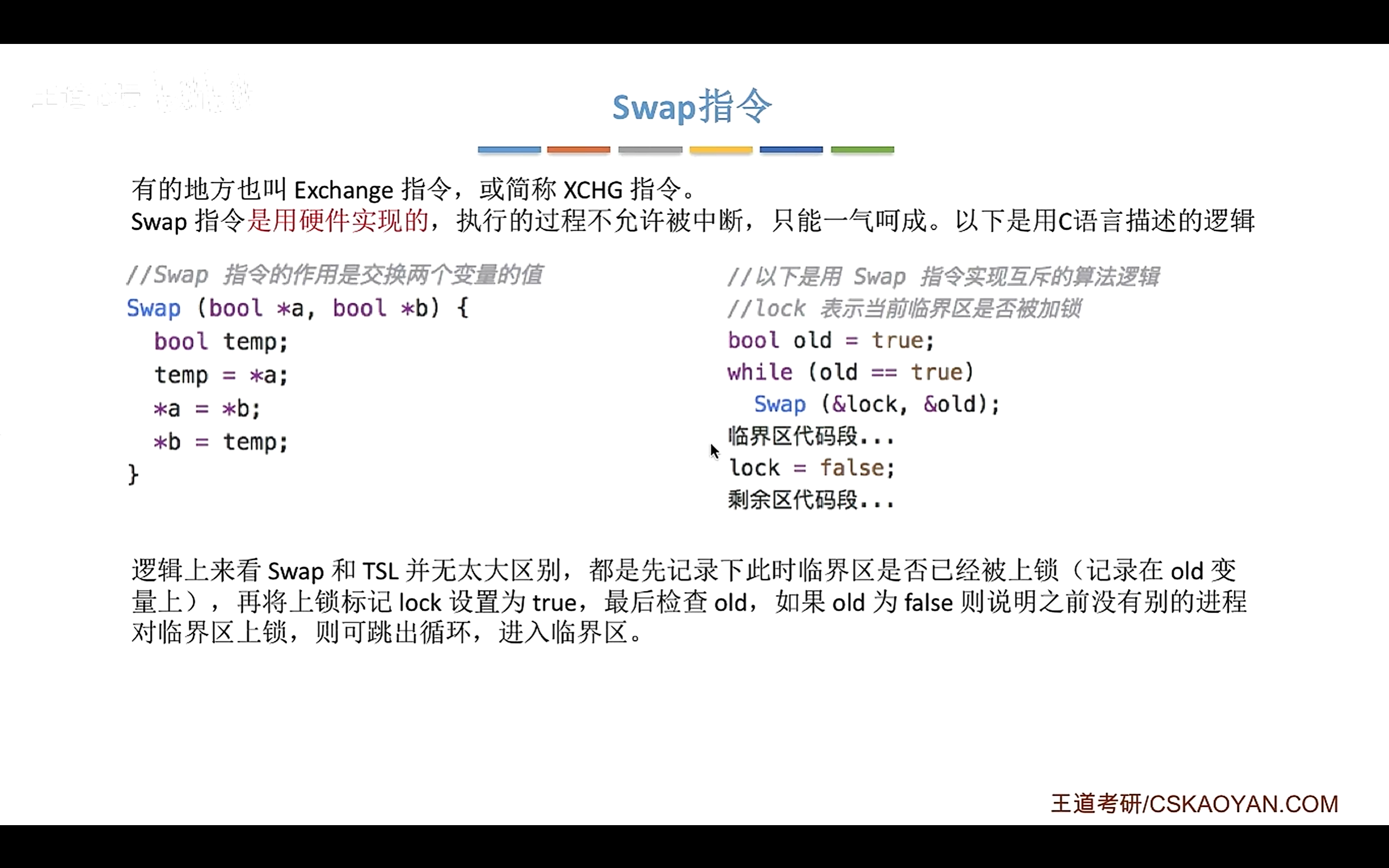
③swap指令
类似于TSL指令。
回顾
进程互斥的高级方法
互斥锁
【还有信号量,管程,条件变量等】
上锁:acquire()
解锁:release()
互斥锁主要缺点是:忙等。
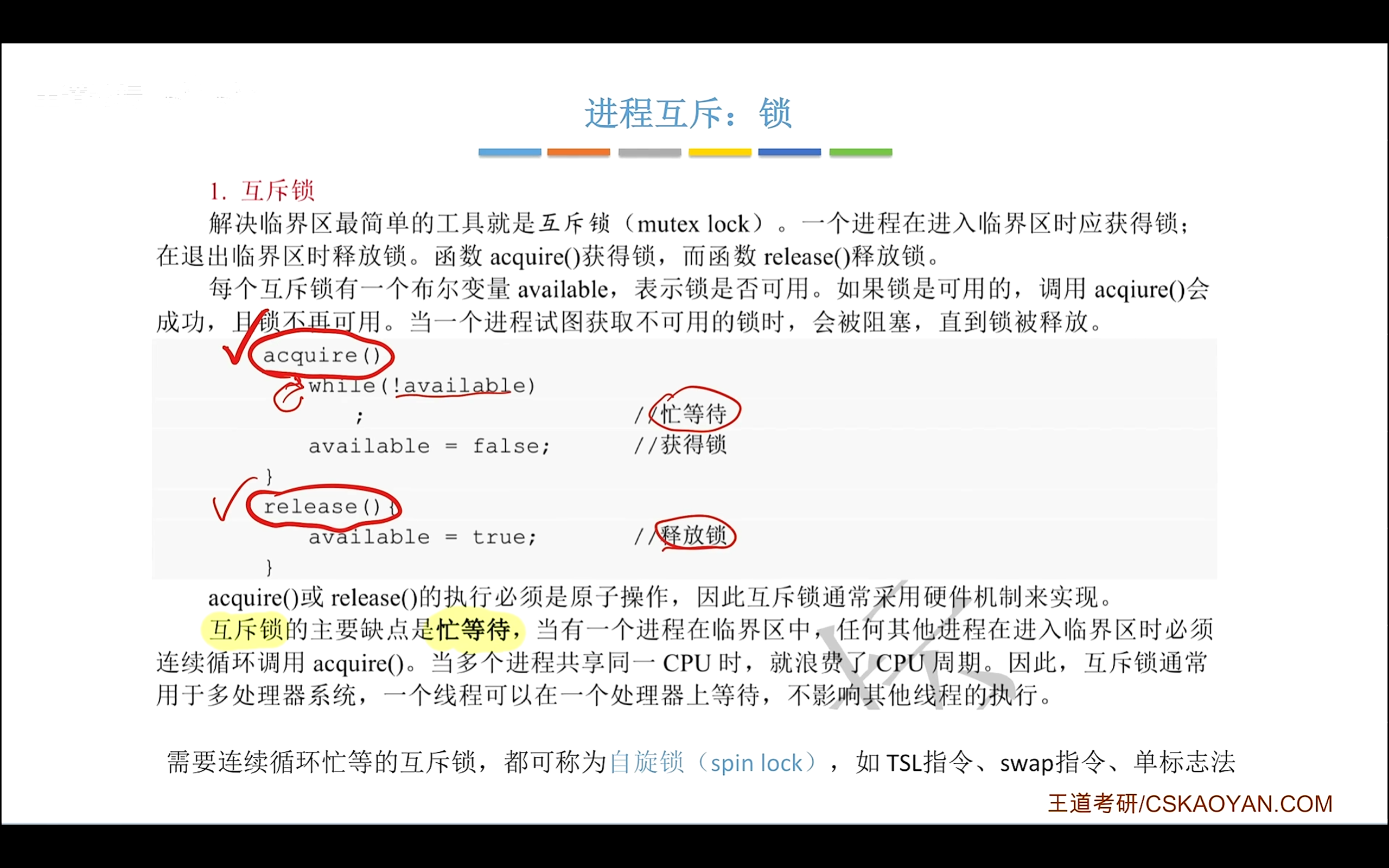
自旋锁:需要连续循环忙等的互斥锁。
自旋锁的底层实现:可以是TSL指令,swap指令,单标志法。
自旋锁的特点:
自旋锁适用于临界区极短且多处理器的场景;
如果临界区较长或单处理器,应使用阻塞型互斥锁。
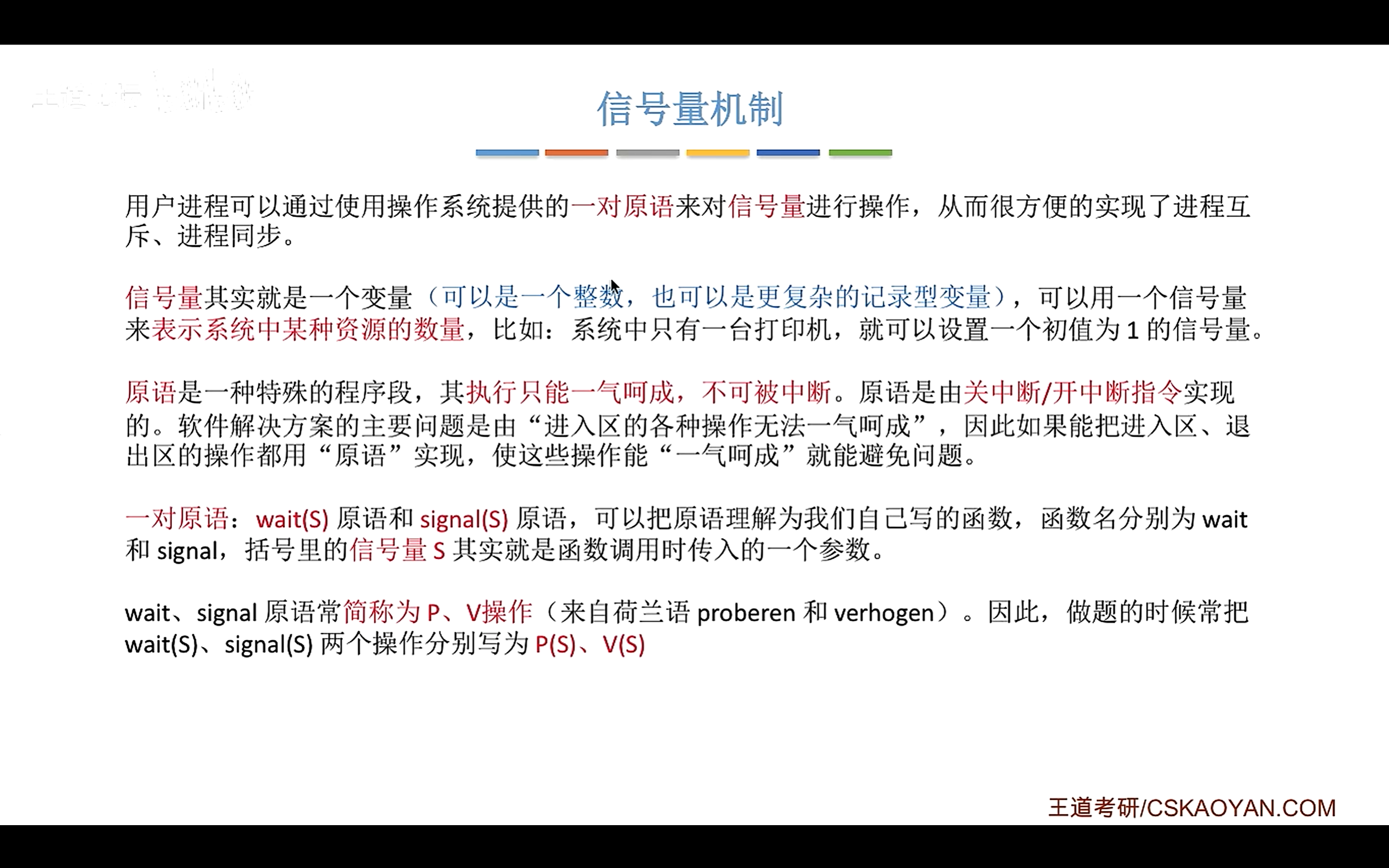
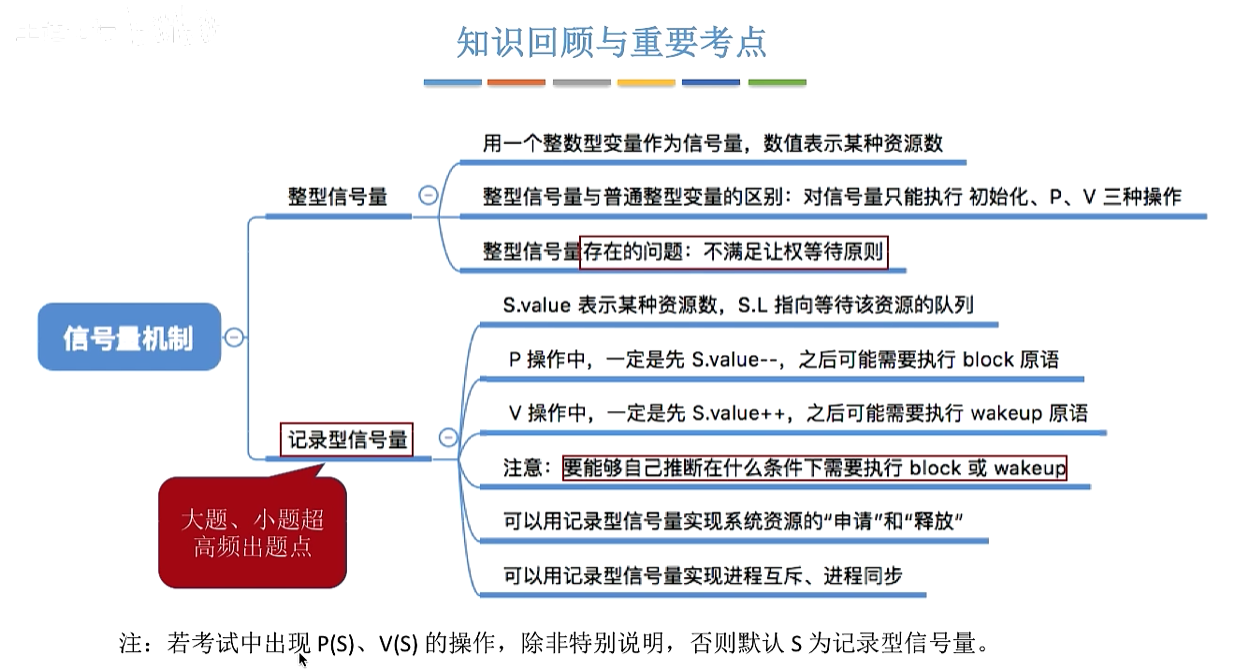
信号量机制
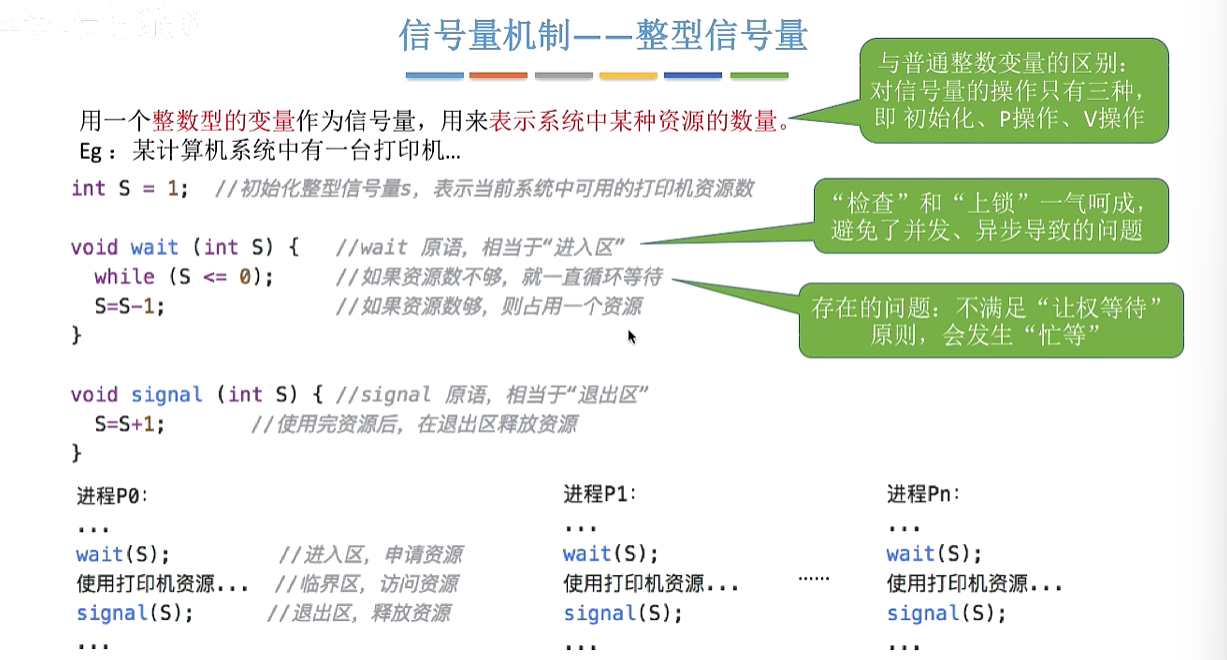
整型信号量
原理:和双标志先检查后上锁相同。但是实现了 检查和上锁 一气呵成。(避免进程同时在临界区的问题)
缺点:不满足“让权等待”,会发生忙等。
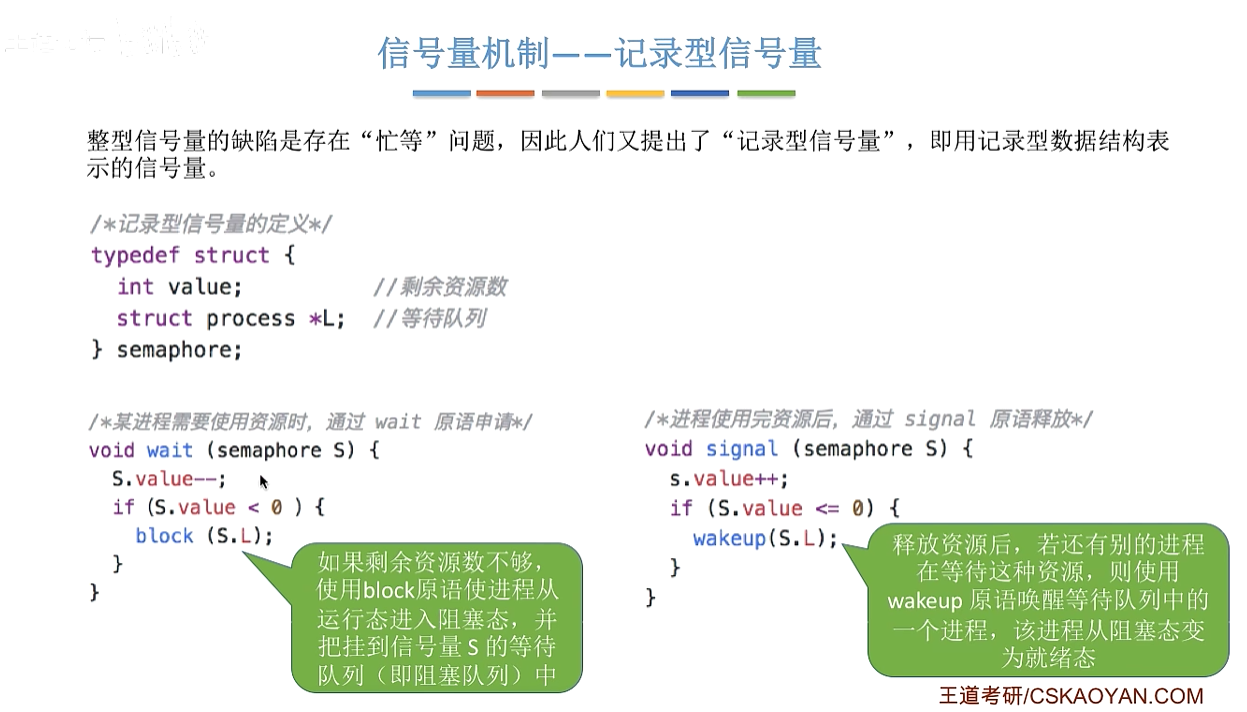
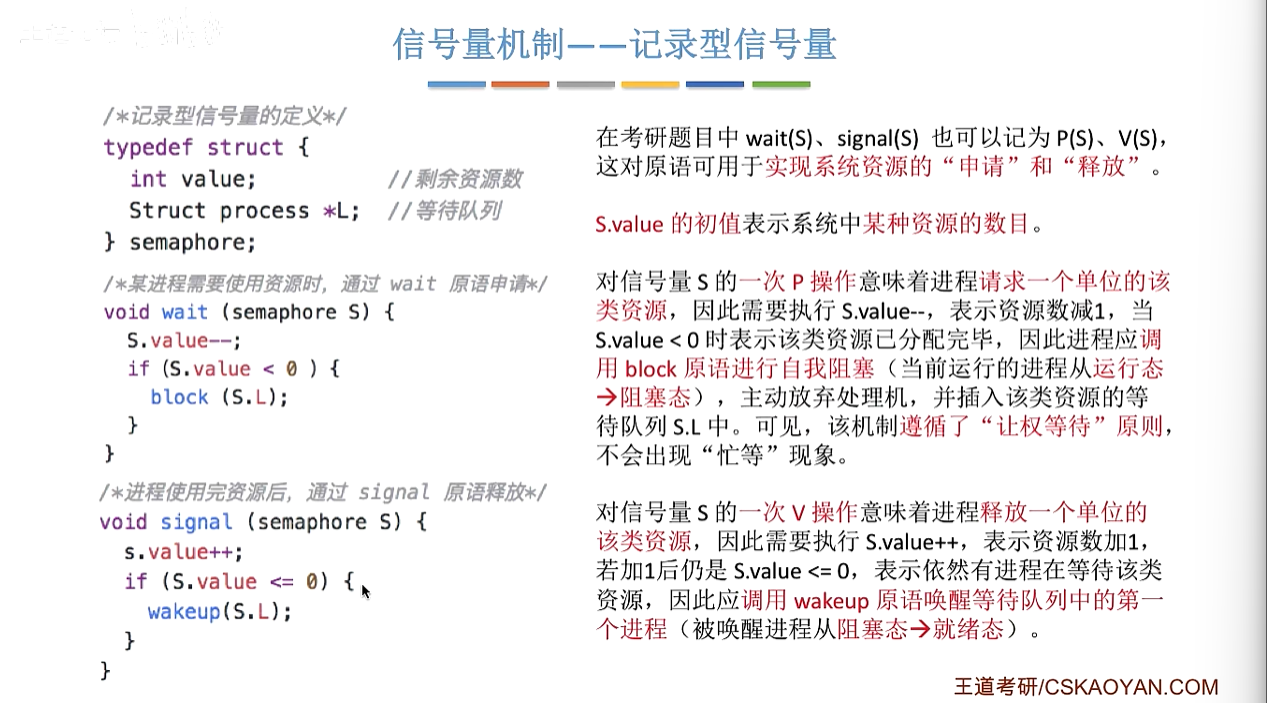
记录型信号量⭐
原理:S. value表示剩余资源数,S.L指向等待资源的队列。
优点:遵循了“让权等待”原则(解决了“忙等”的问题)
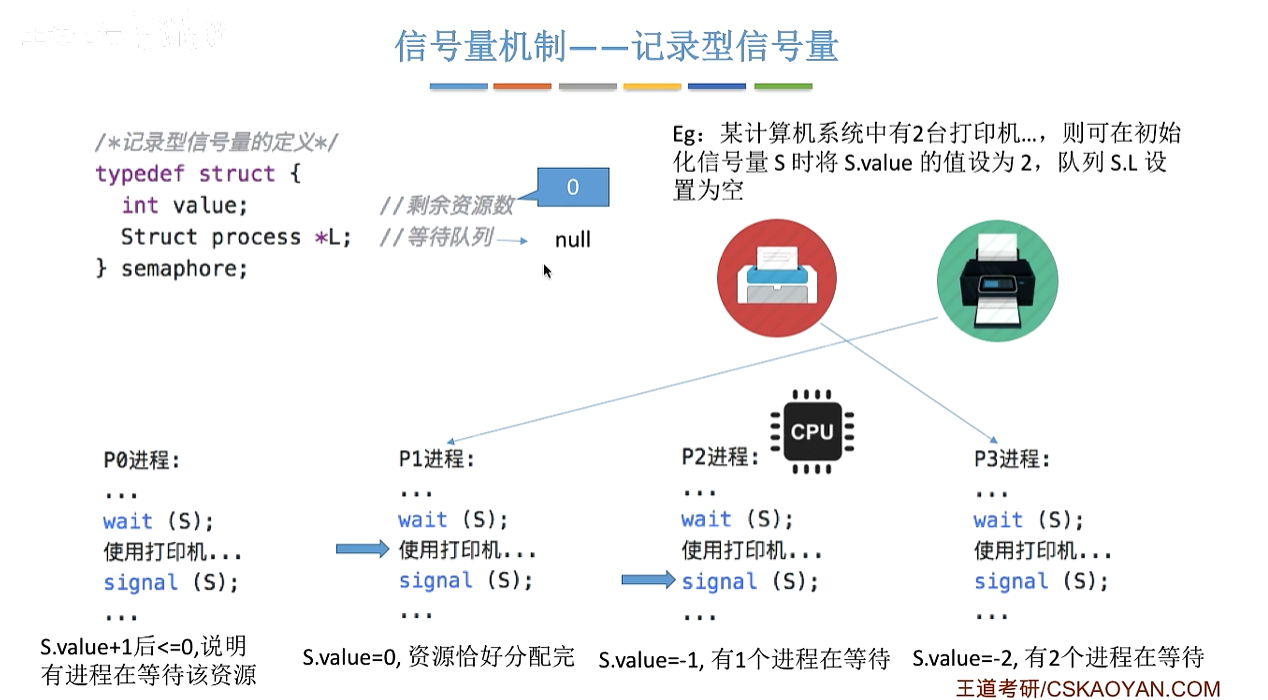
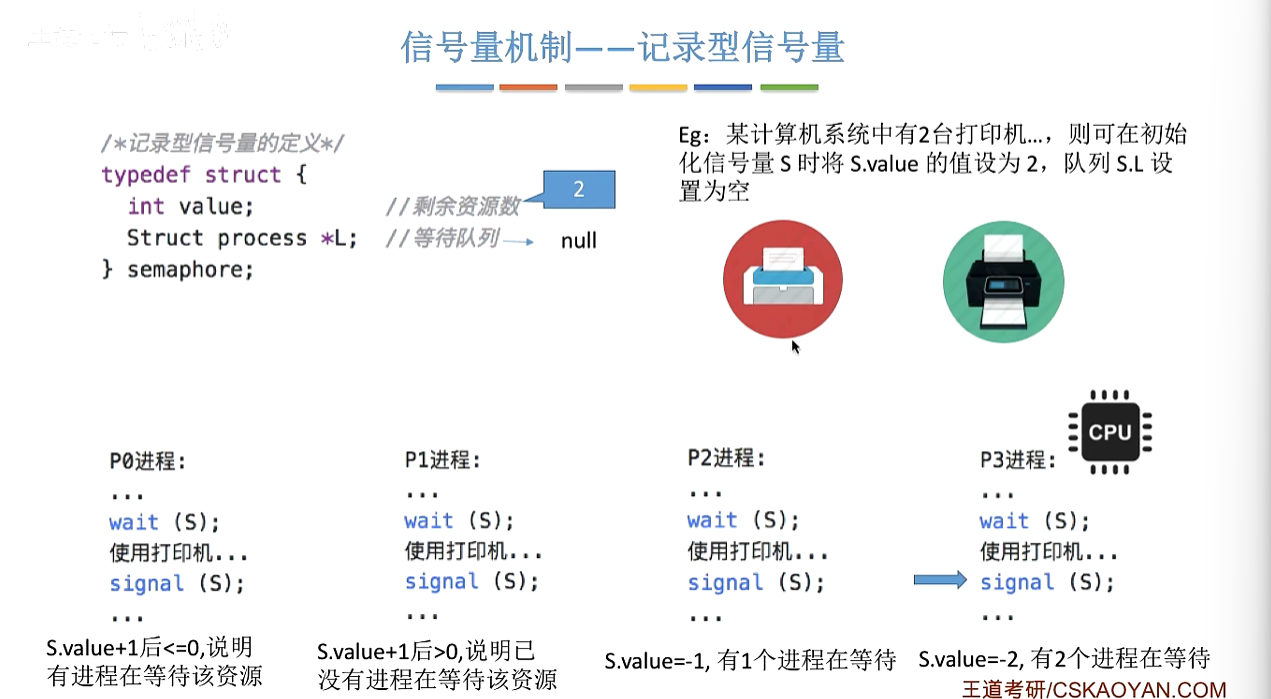
EG
回顾
用信号量机制实现进程互斥、同步、前驱关系
P(s) – 申请一个进程S,如果资源不够就阻塞等待
V(s) – 释放一个资源S,如果有进程在等待该资源,则唤醒一个进程。
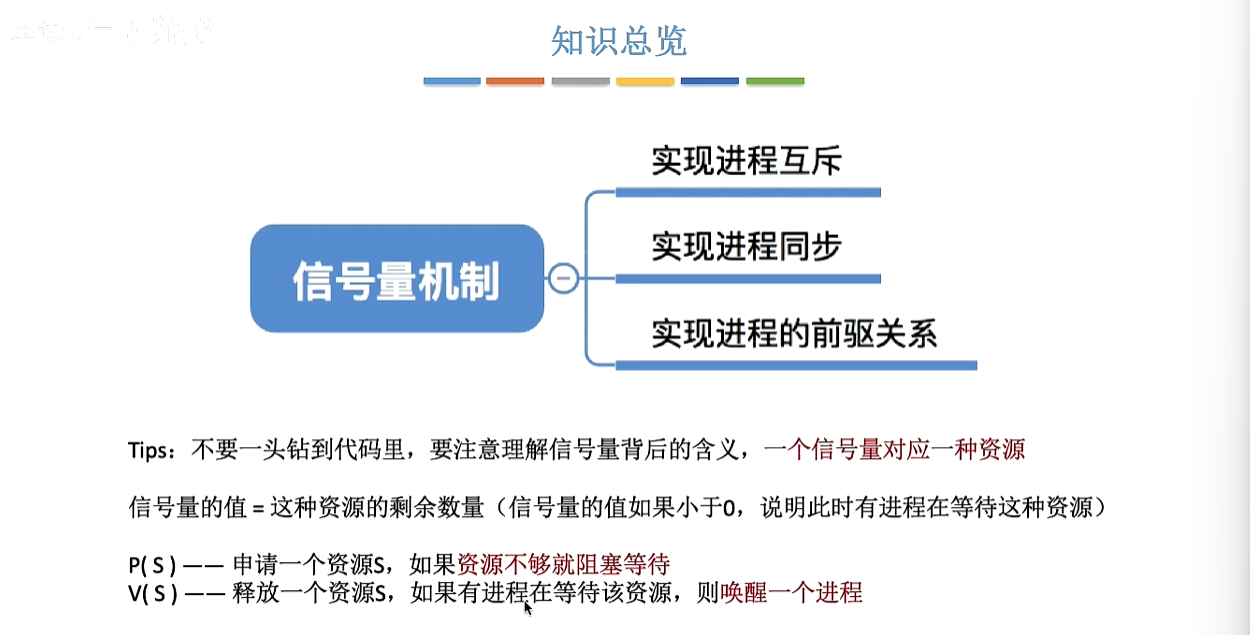
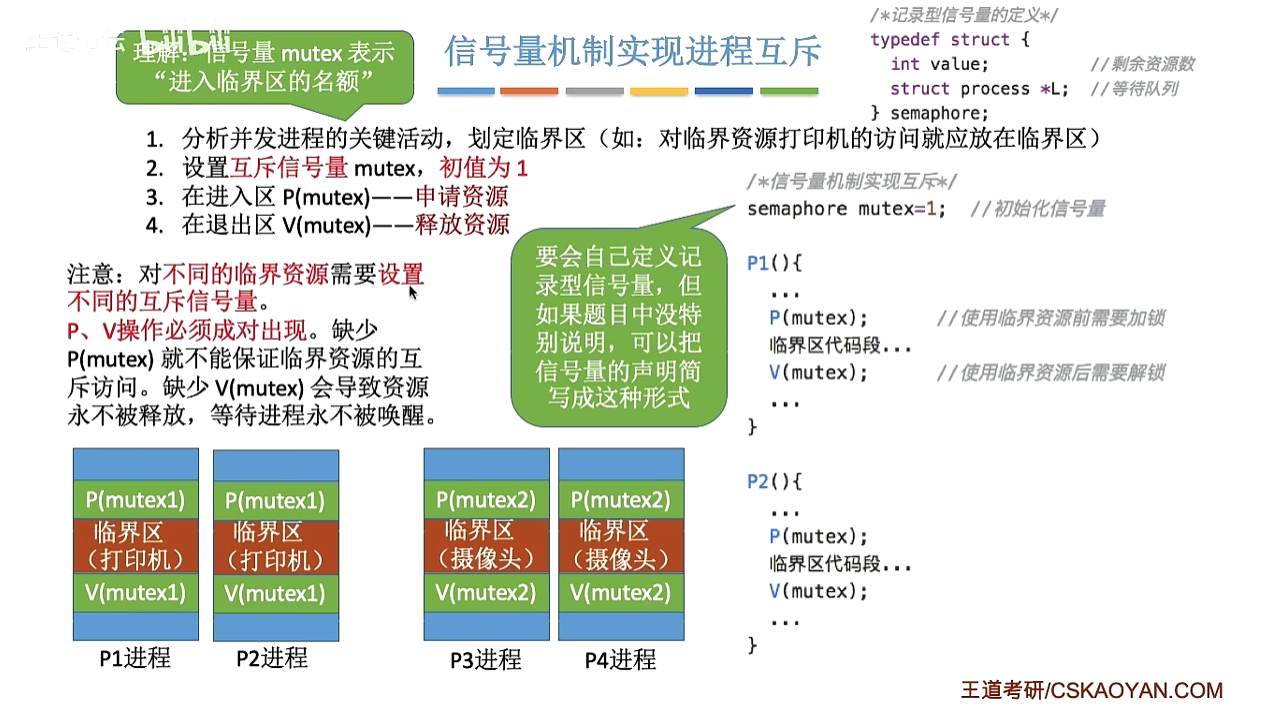
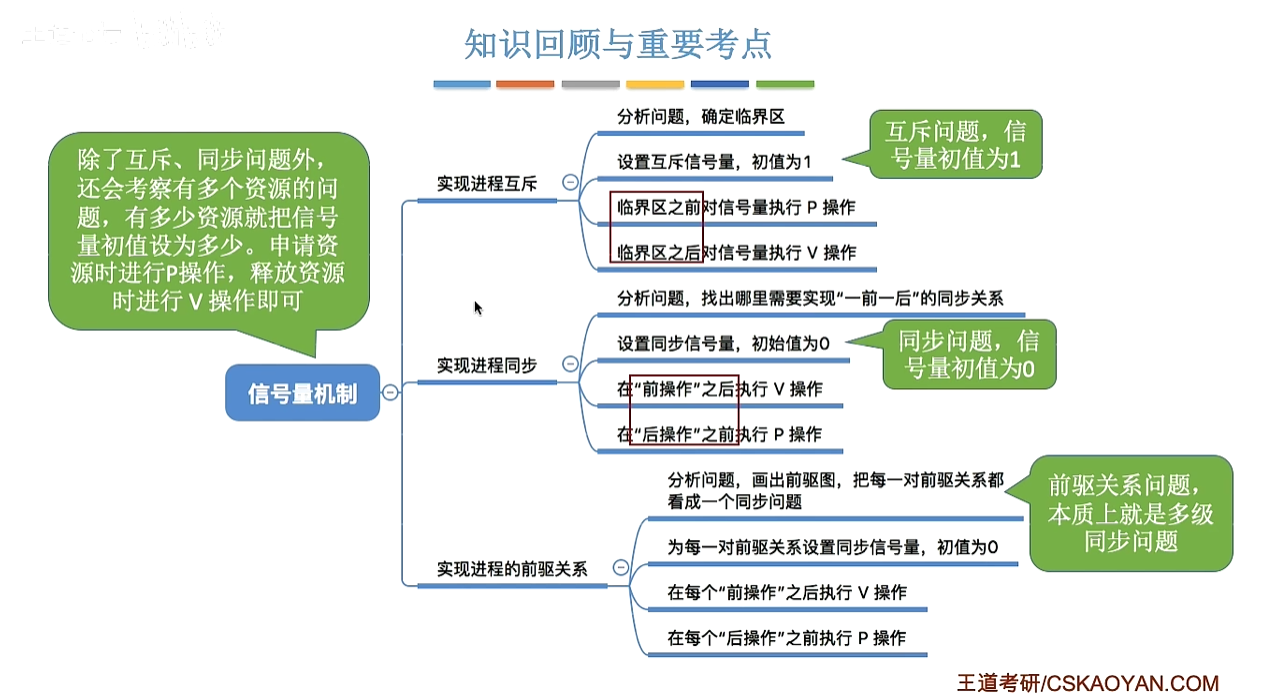
实现进程互斥
信号量初始值为1。
临界区之前对信号量执行P操作
临界区之后对信号量执行V操作
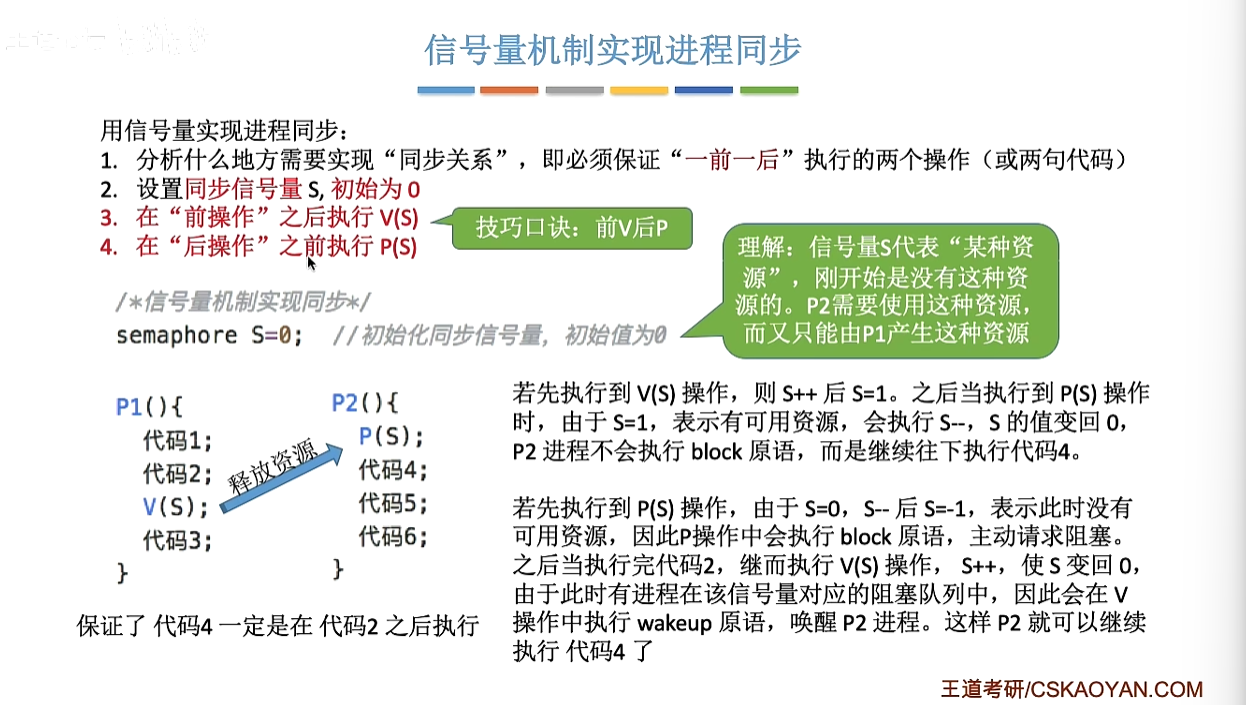
实现进程同步
同步:保证顺序执行。
信号量初始值为0。
临界区之前对信号量执行V操作。
临界区之后对信号量执行P操作。
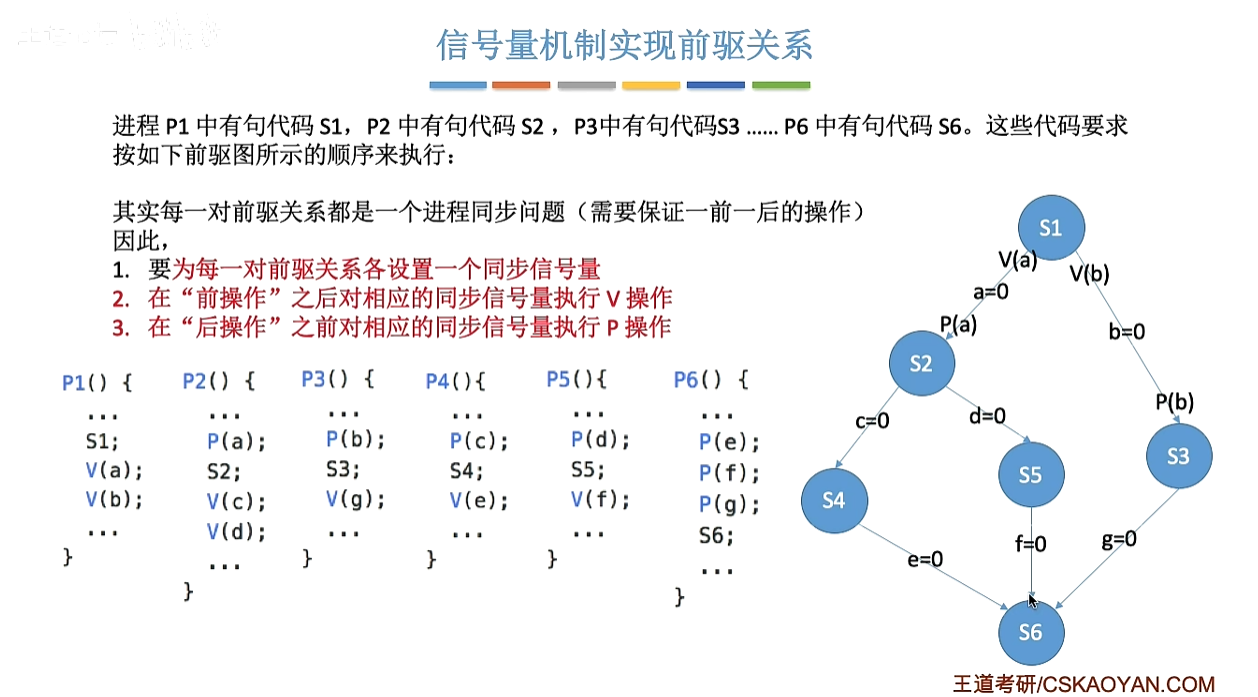
实现前驱关系
有多少个资源,信号量初始值就为多少。
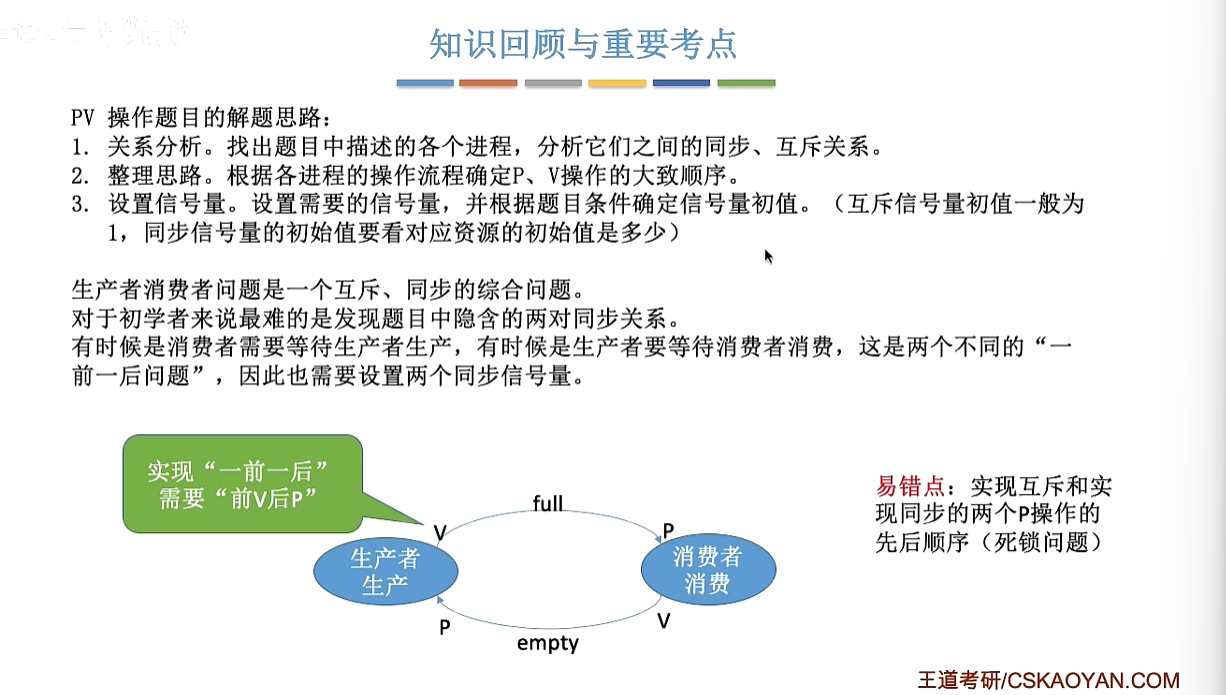
前V后P。
回顾
进程同步互斥问题
生产者消费问题
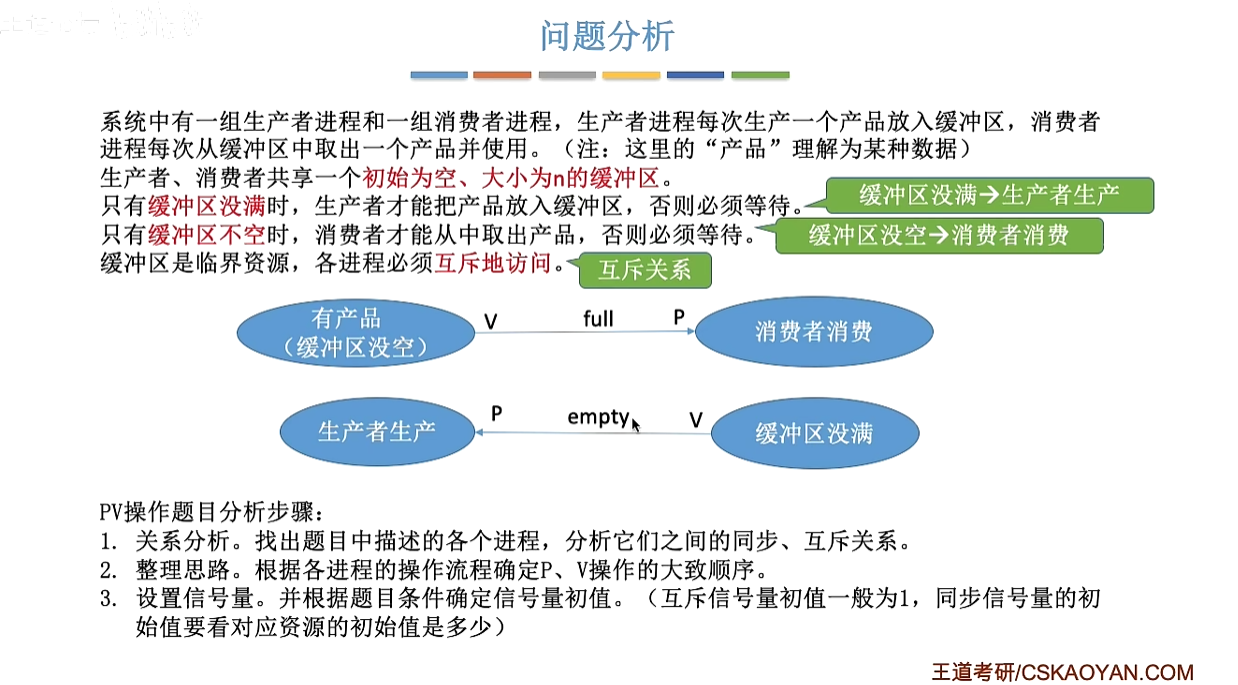
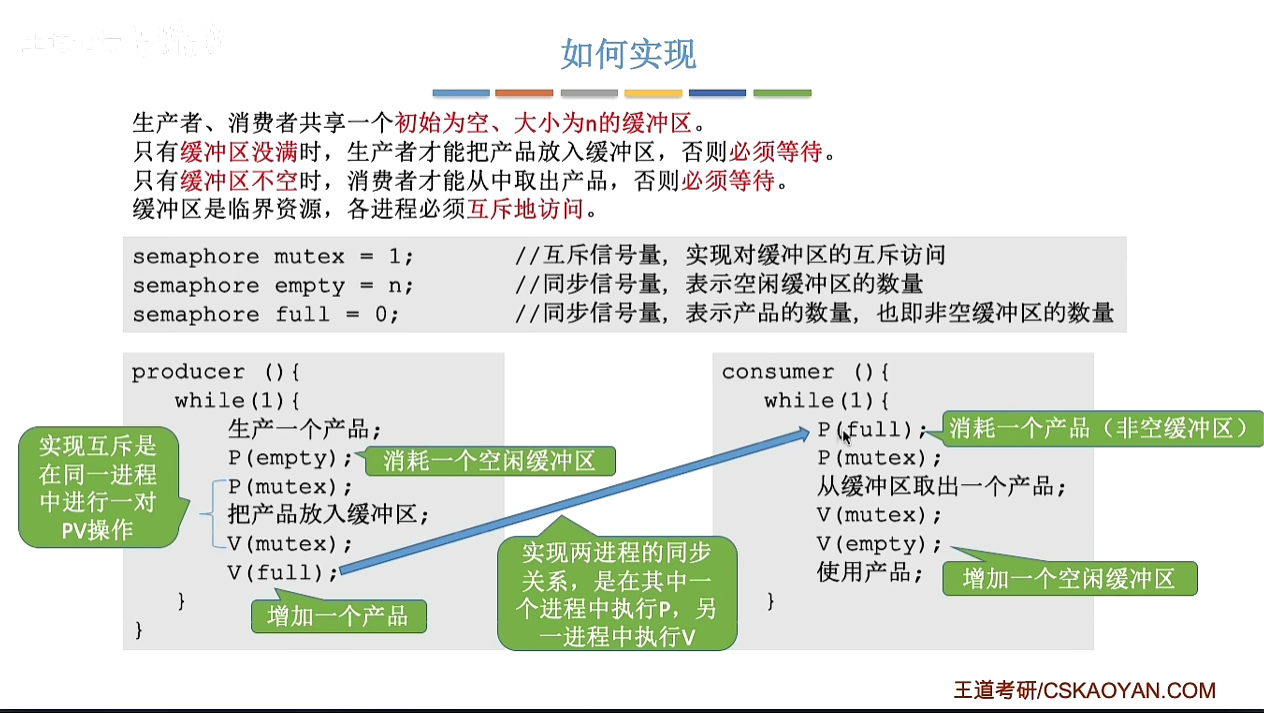
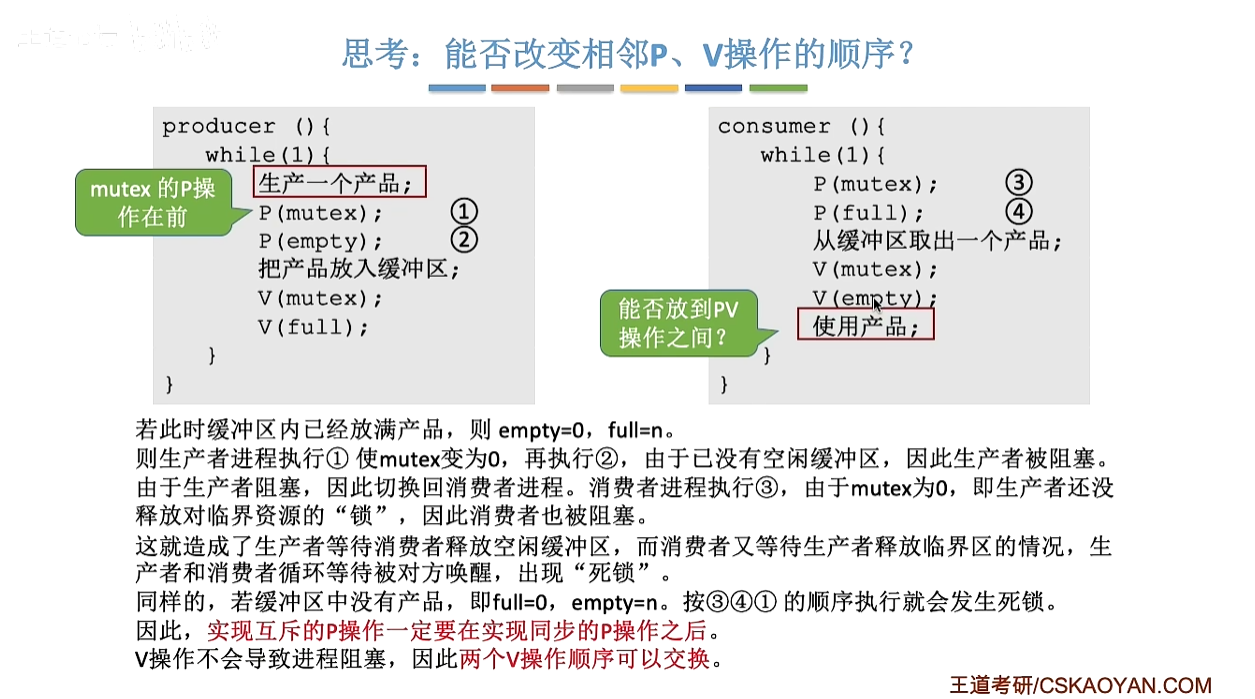
不能改变相邻P操作的顺序:会造成死锁(生产者和消费者都在等待对方释放资源,出现“死锁”)
- 因此实现互斥的P操作一定要在实现同步P操作之后。
可以改变相邻V操作的顺序,不会造成进程阻塞。
不建议把处理内容都放入临界区,会造成临界区上锁时间长。
回顾