
OS-2.3 同步和互斥
同步和互斥
进程同步,进程互斥
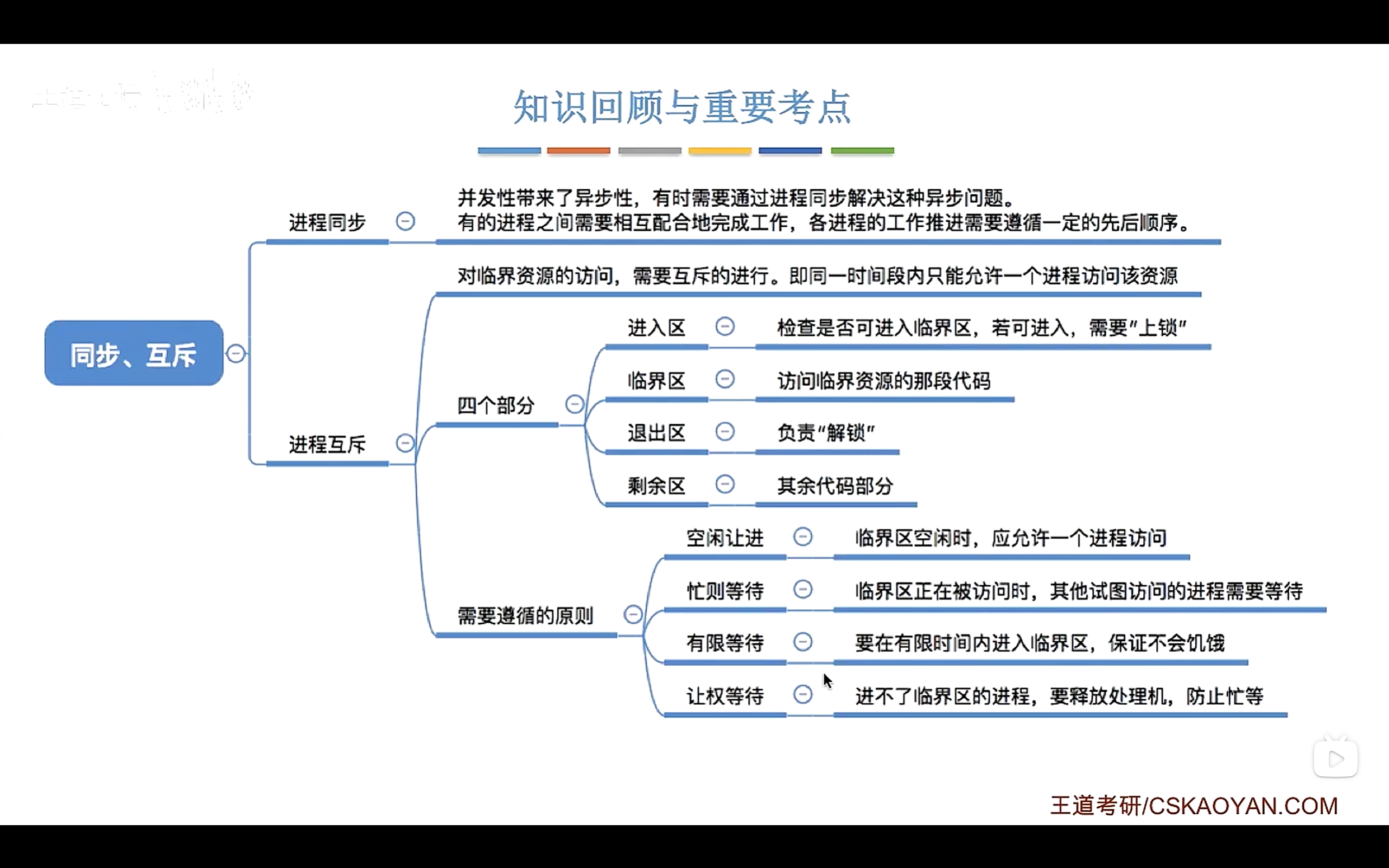
①进程同步:解决进程的异步问题,协调工作顺序。
②进程互斥:对于临界资源 / 共享资源,必须互斥地进行访问。(or结果就像两个文档打印混一起了)
- 不同线程 对 同一个进程 的共享变量 的访问才可能需要互斥,不同进程的不同线程不存在互斥访问。
临界资源:互斥,共享 – 资源。
临界区:访问临界资源的那一个 代码段。
- 临界区是为了保护临界资源而存在的。(所以5个并发进程就有5个共享操作变量X的代码段)
实现互斥的四个代码段:
进入区。临界区。退出区。剩余区。
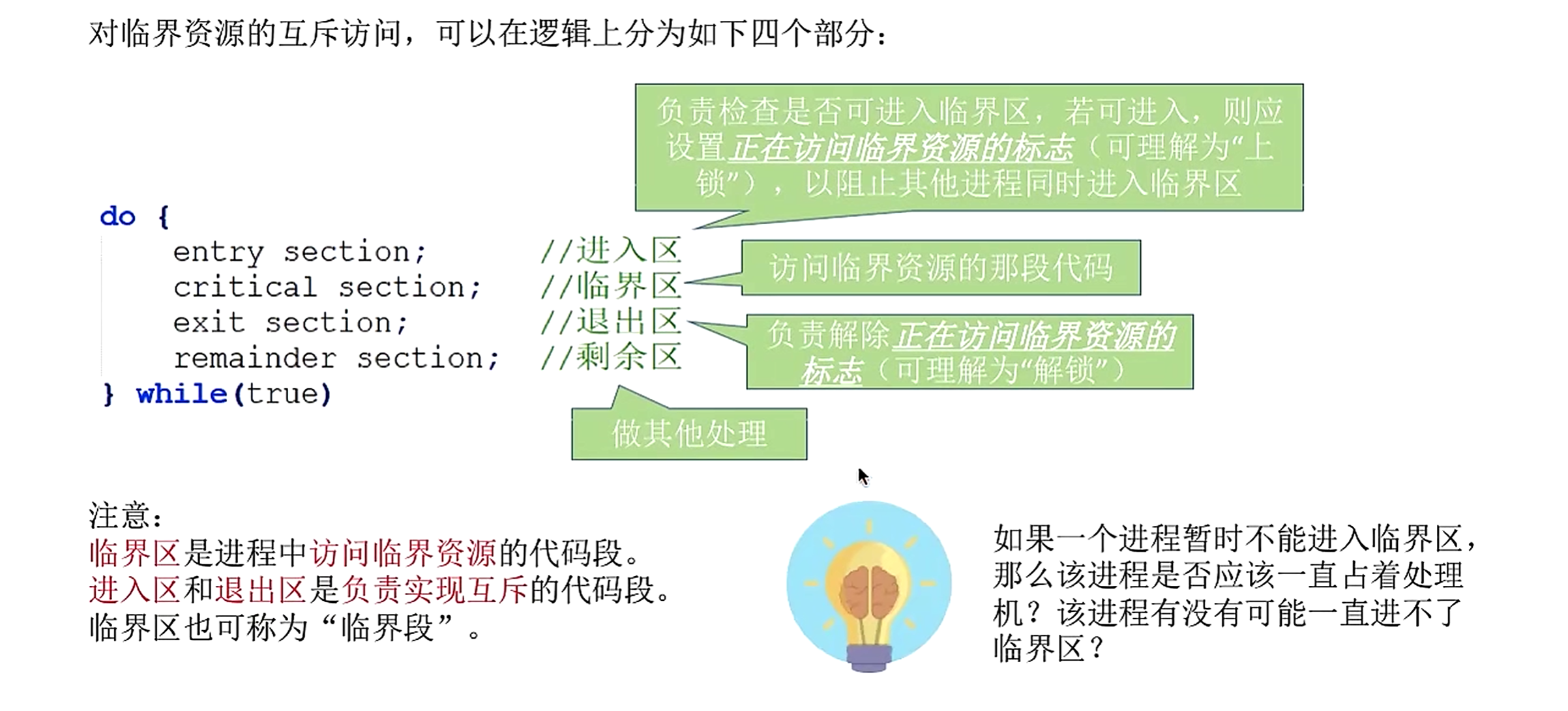
==实现同步遵循的四个原则:==
空闲让进。忙则等待。有限等待。让权等待。

note:
可重入代码:不允许被修改的代码,又叫纯代码。
- 所以这种代码能在多个时刻被任意进程共享,无需互斥。(EG:进程映像中的程序(段))
回顾
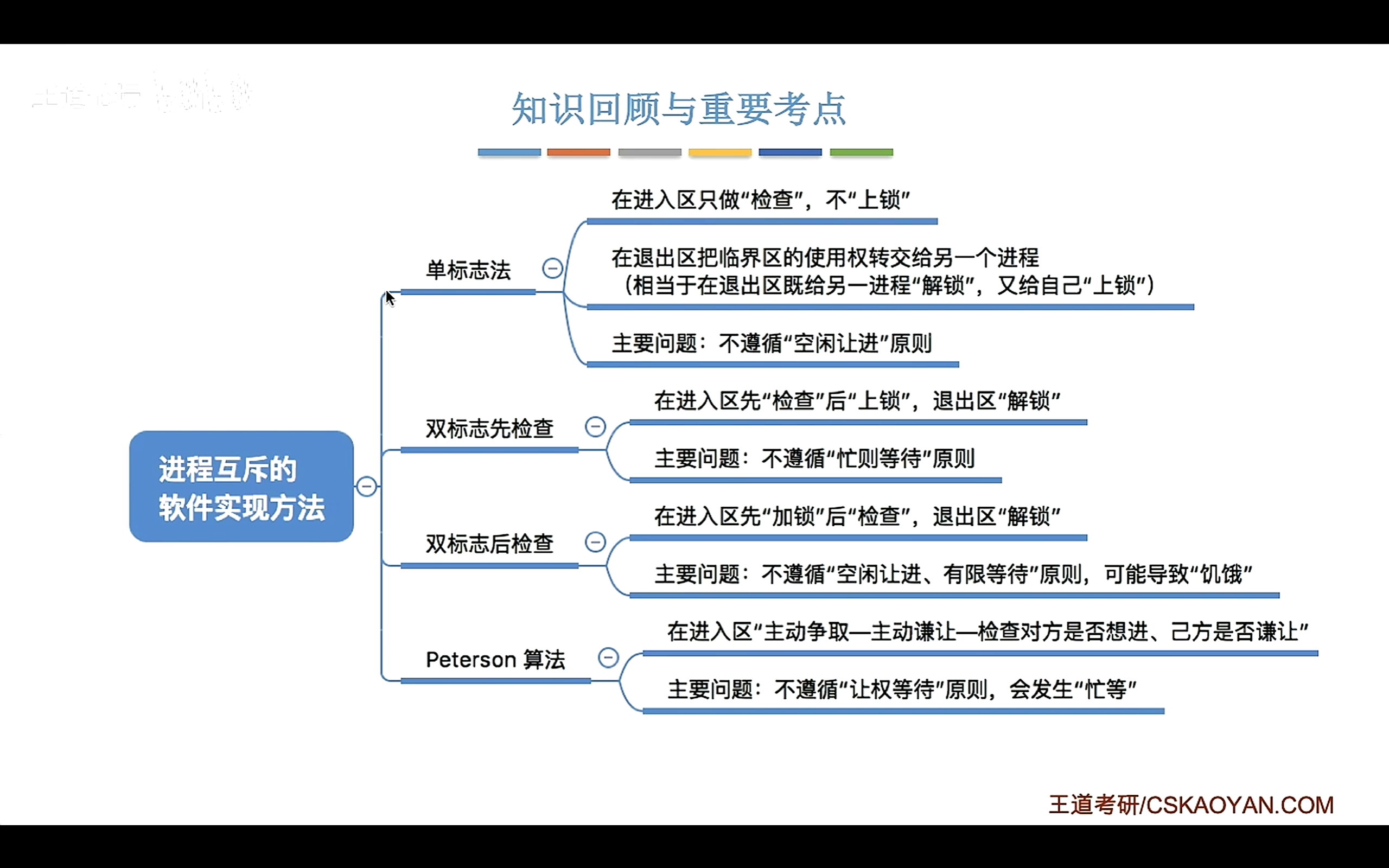
进程互斥的软件实现方法
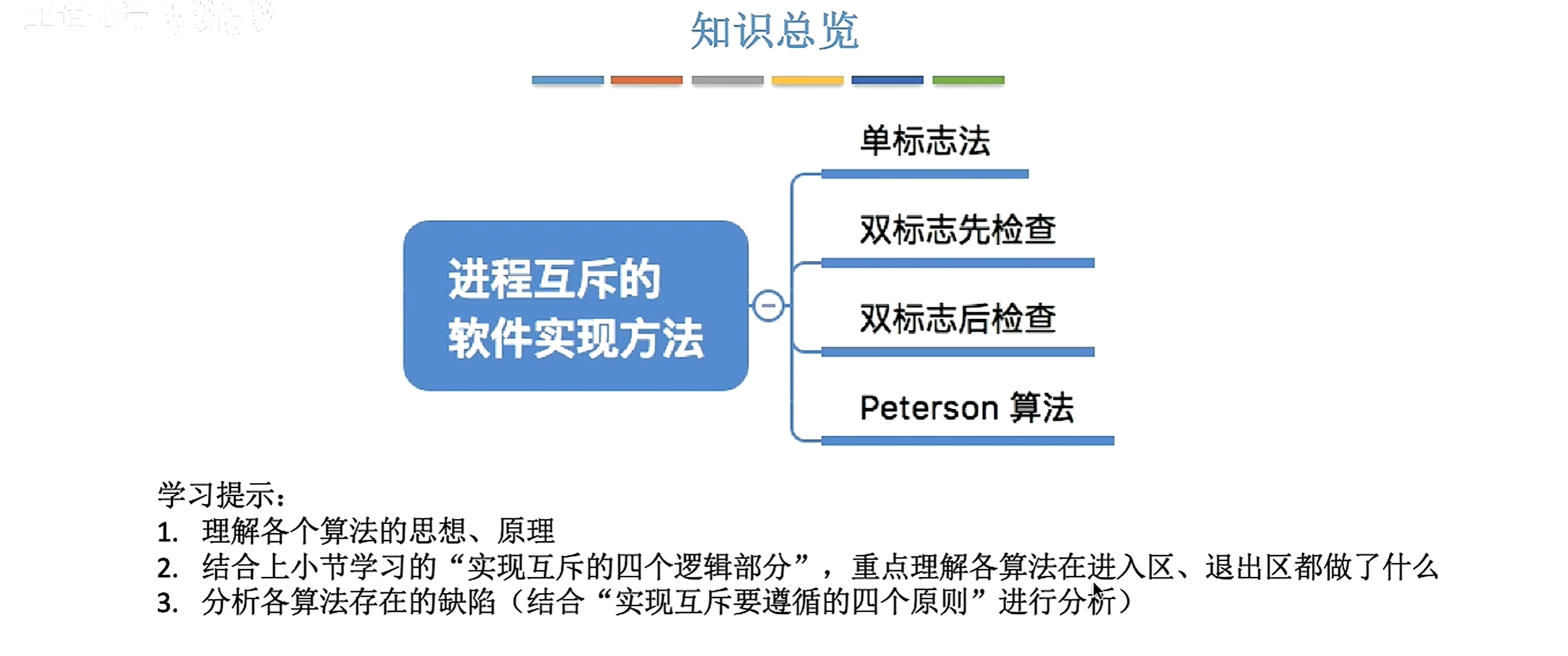
①单标志法
一个进程在访问完临界区后,会把使用临界区的权限 交给 另一个进程。
标志位turn,表示当前允许进入临界区的进程号。
- turn=x,轮到x进入临界区,而不是x先发出请求的意思。
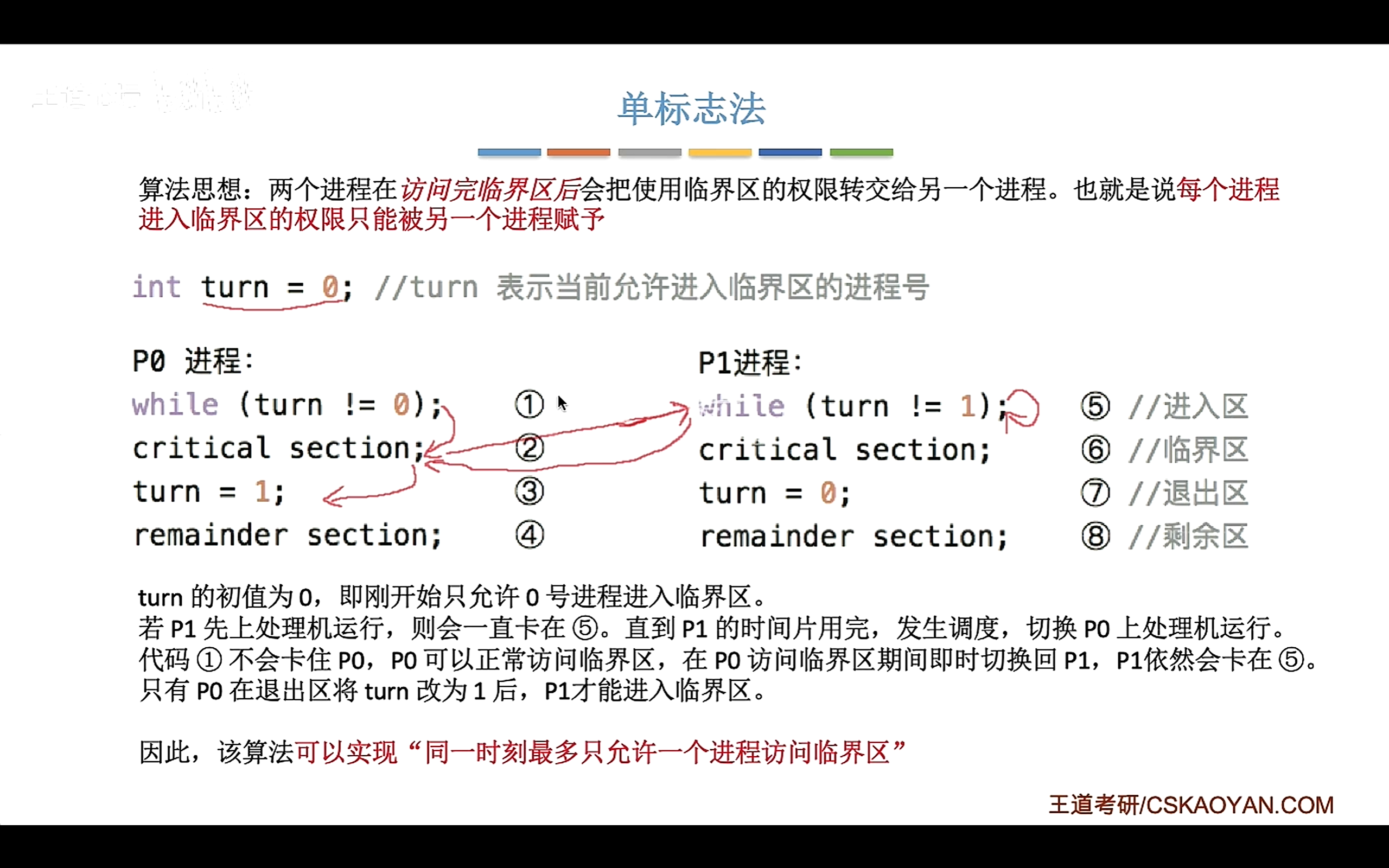
缺点:当允许进入临界区的进程A不访问临界区(或者是并发时时间片到期了),造成临界区空闲,而别的进程如B使用不了临界区。
违背原则:“空闲让进”。
②双标志先检查法
先“检查”后“上锁”
先检查对方想不想使用(检查)
自己要用(表达意愿,上锁)。 flag[0],flag[1]标记各进程的意愿,T/F。
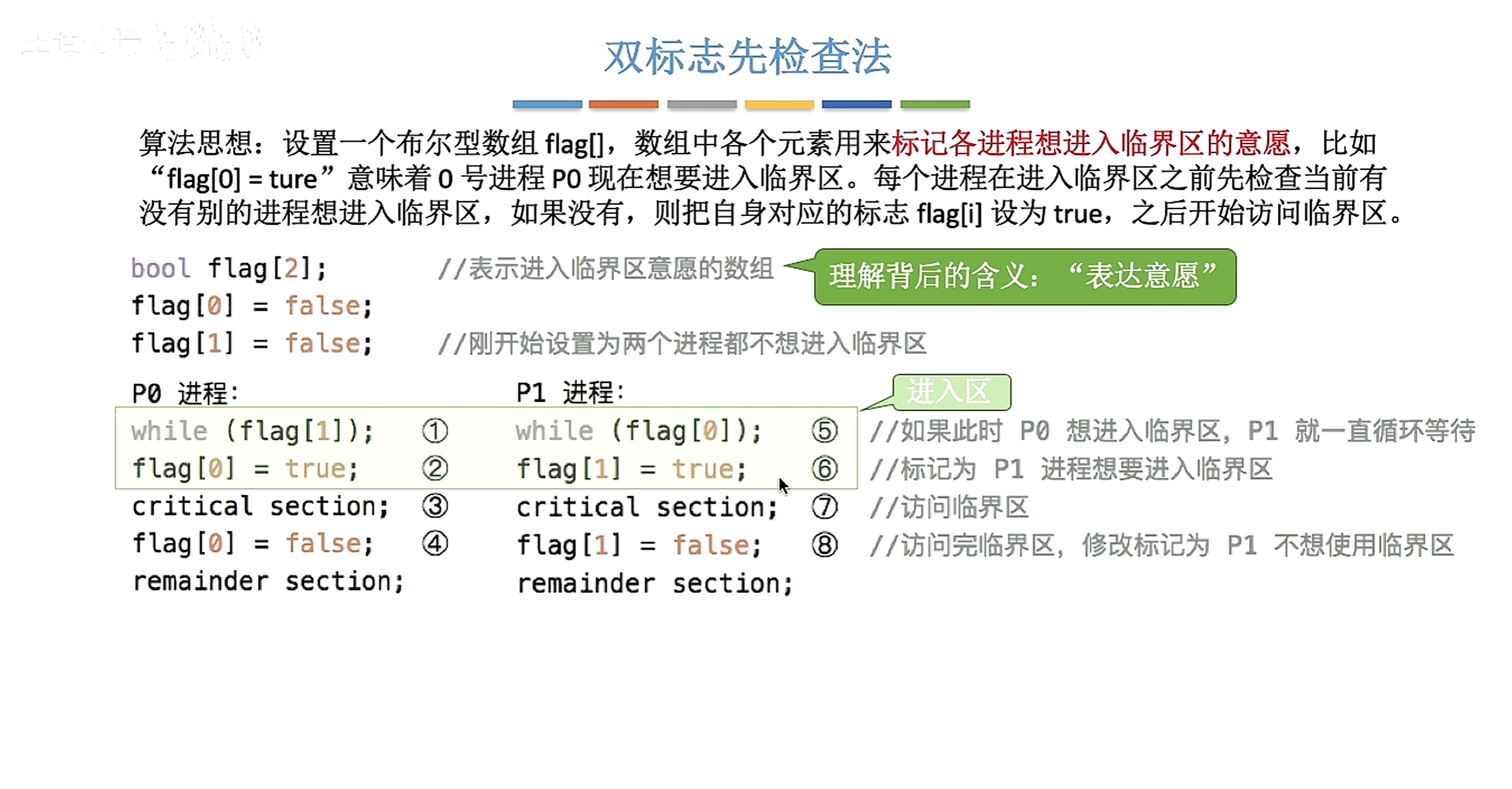
缺点:如果两个进程是,并发的运行时,时间片切换,【1[false](time out)-5[false]-6-7(time out),2-3】会造成两个进程P1 P2同时使用临界区。
违反原则:“忙则等待”
原因在于:“检查”后,“上锁”前,可能发生进程切换。【即进入区的“检查”和“上锁”两个处理不是一气呵成的。】
③双标志后检查法
先“上锁”后“检查”。
自己想用临界资源(表达意愿,上锁)
自己不想再问对方。(检查)
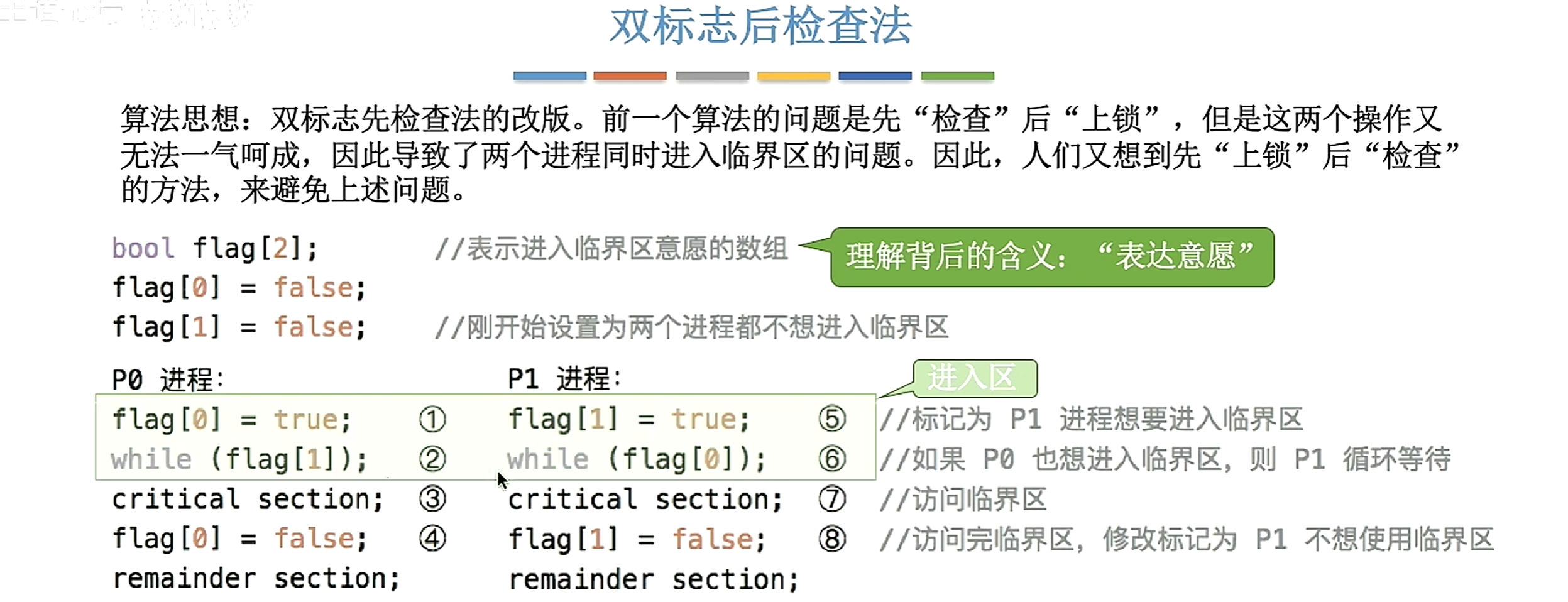
缺点:并发运行,两个进程都访问不了临界区。【1(time out)-5(time out)-2-6-…】。造成“饥饿”。
违背原则:“空闲让进”,“有限等待”。
④peterson 算法
1.主动争取【flag[自己id]=true】
2.主动谦让【turn=对方id】
3.如果对方也想使用。且最后一次是自己谦让,则让对方进入临界区。【while(flag[对方id] && turn==对方id】
初始的 flag[]=false。
是 单标志法+先上锁后检查法的综合。
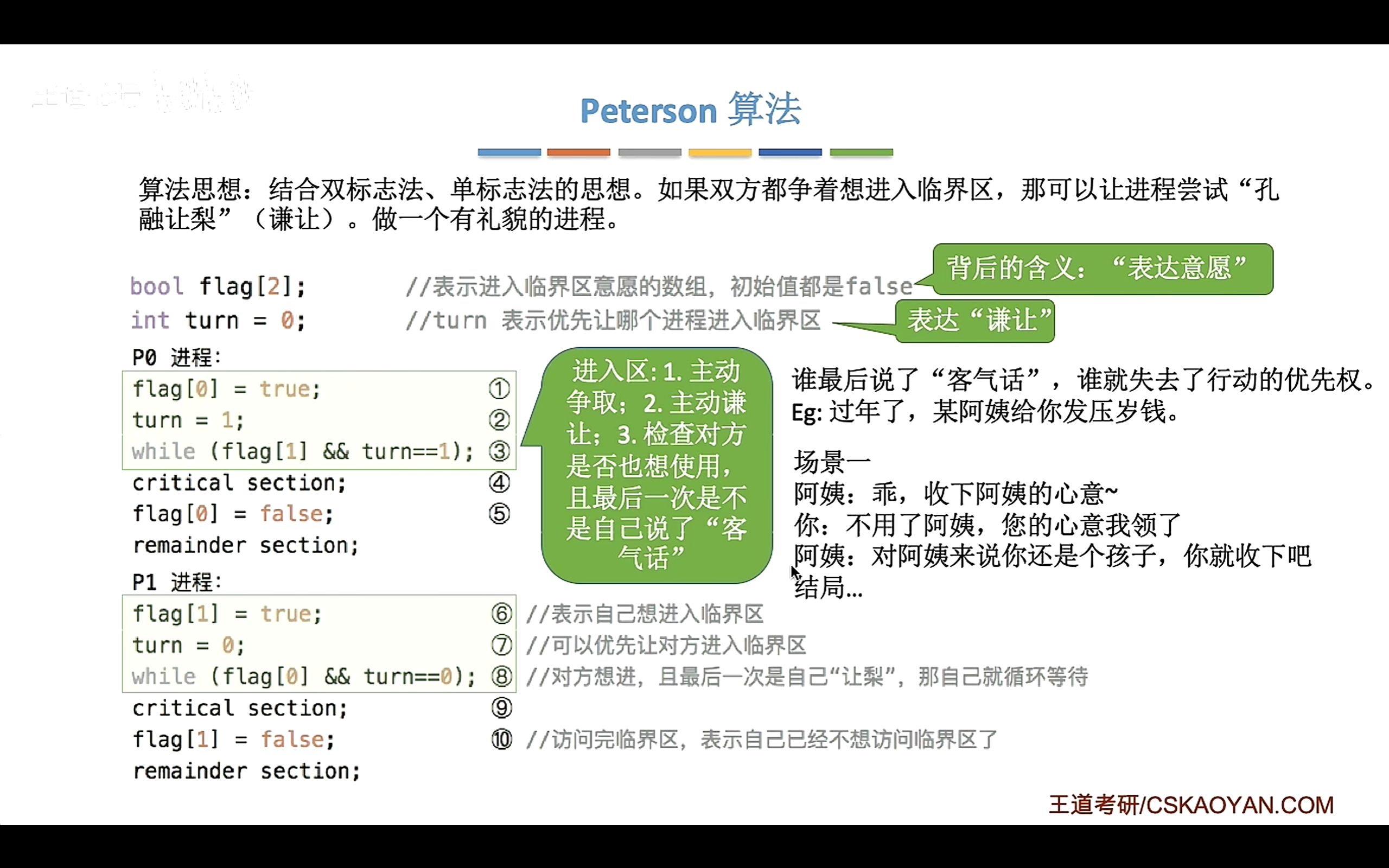
优点:遵循了空闲让进,忙则等待,有限等待三个原则。
缺点:没有遵循让权等待的原则。造成“忙等”
回顾
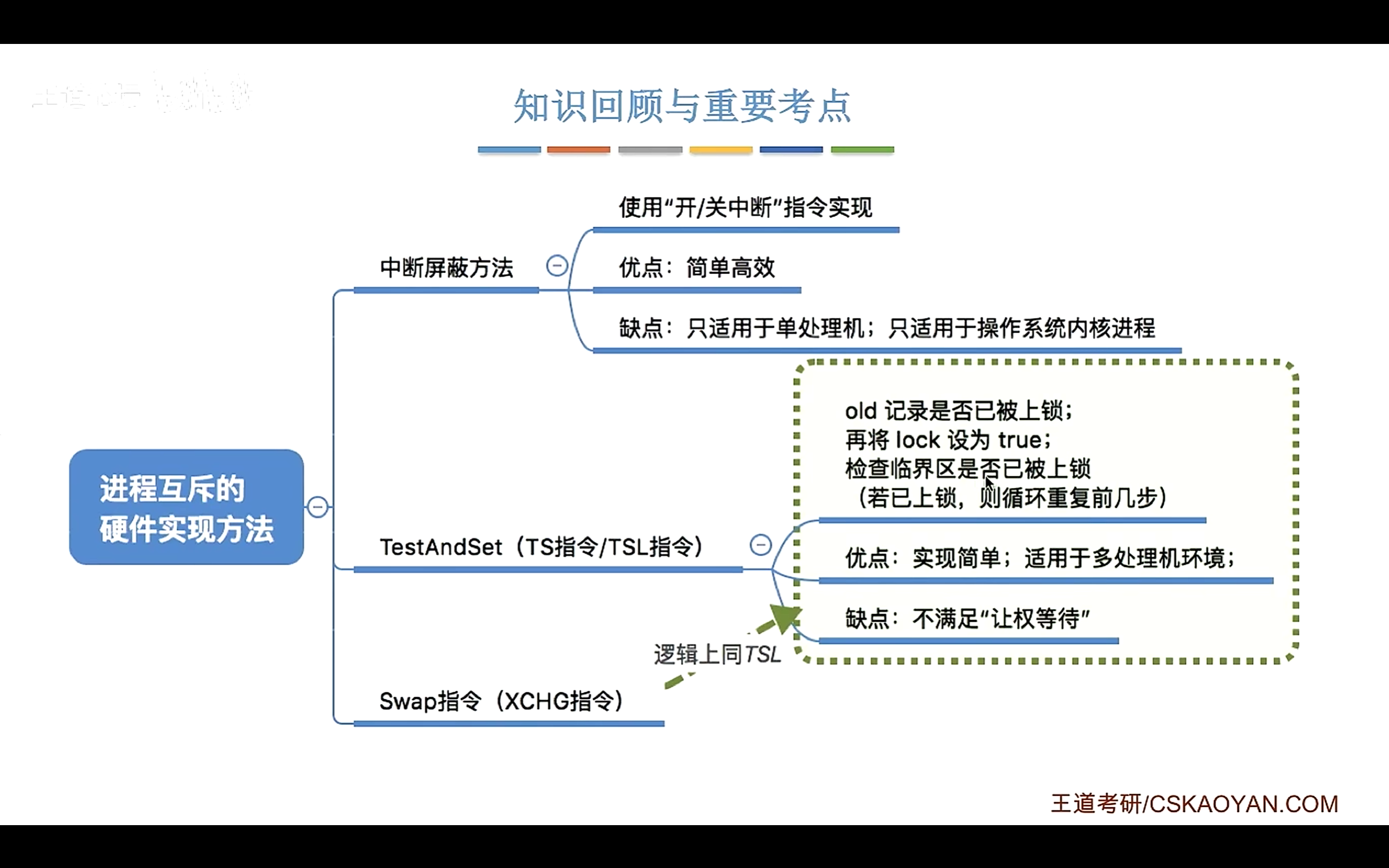
进程互斥的硬件实现方法
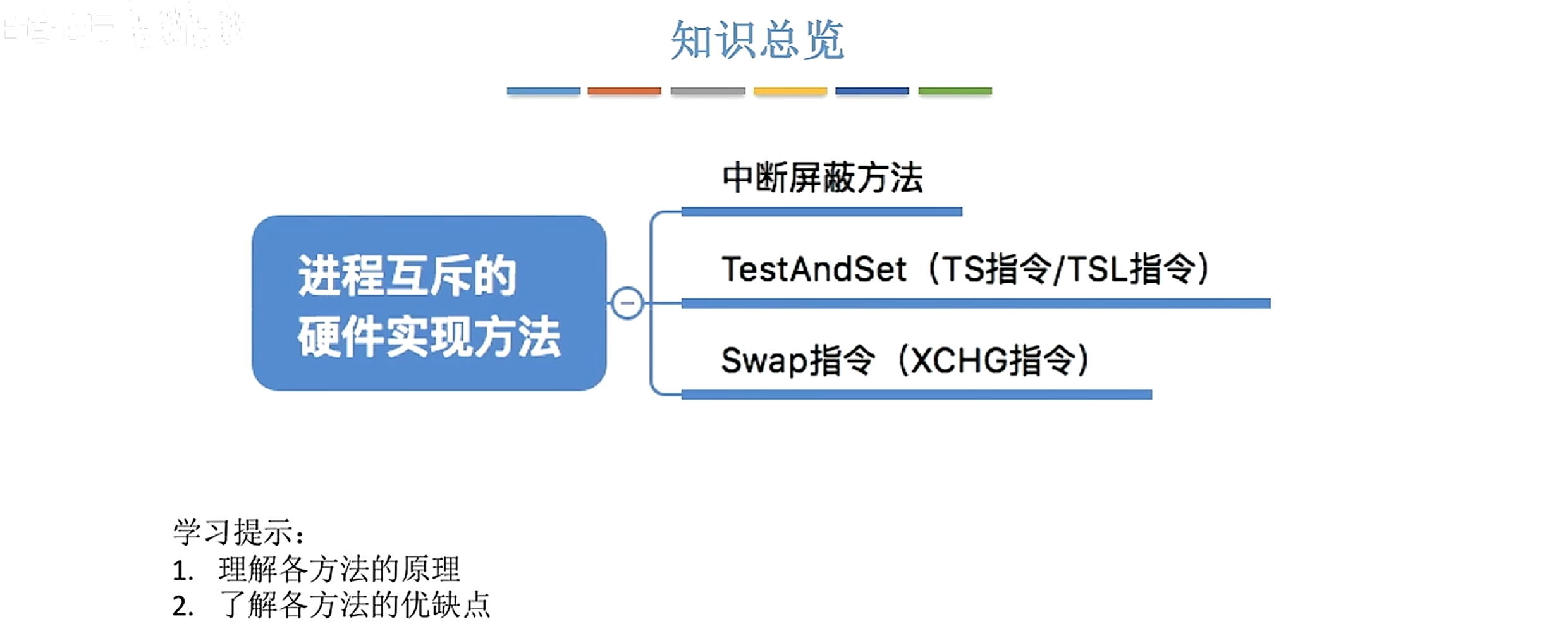
①中断屏蔽方法
实现机制:开/关中断指令
优点:简单,高效
缺点:
①不适合多处理机。(一个cpu关中断不能阻止其他cpu的进程访问同一共享资源)
②限制了CPU的并发执行能力。(屏蔽期间”冻结”当前CPU,无法响应中断、无法进程调度、无法处理I/O。)
③只适用于OS内核进程。(开/关中断指令只能运行在内核态,因为如果用户上锁忘记解锁了,很危险)
②TestAndSet指令
“检查”与“上锁是一体的。
一体的原因是:TSL(TS)指令是一条硬件指令,CPU执行这条指令时不会被打断。
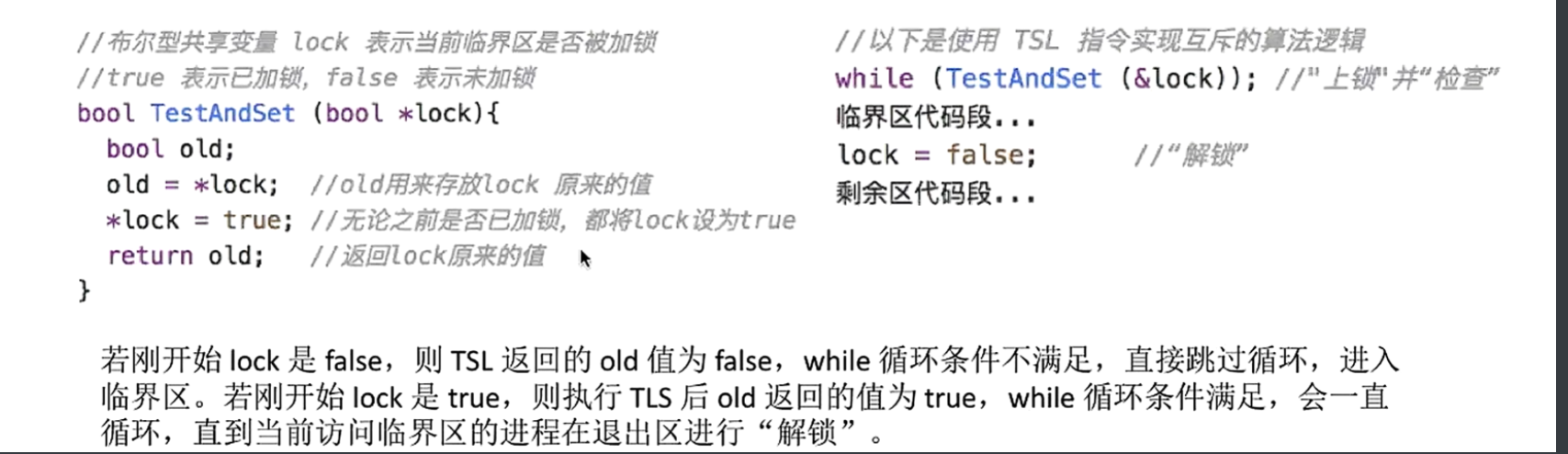
优点:
①实现简单。
②相比于关中断方法,lock是共享变量,适合多处理器系统。
违背原则:“让权等待”
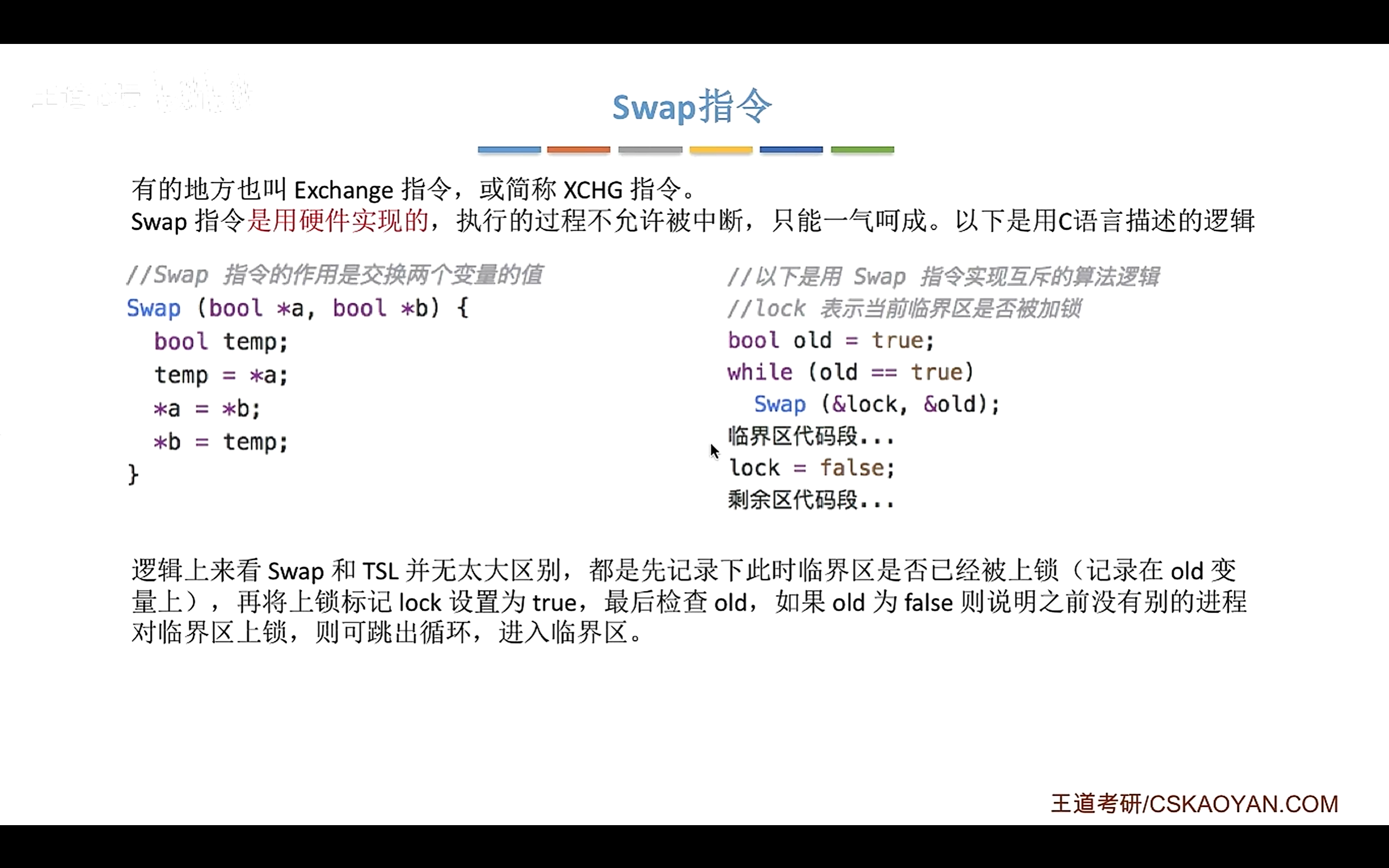
③swap指令
类似于TSL指令。
回顾
进程互斥的高级方法
互斥锁
【还有信号量,管程,条件变量等】
上锁:acquire()
解锁:release()
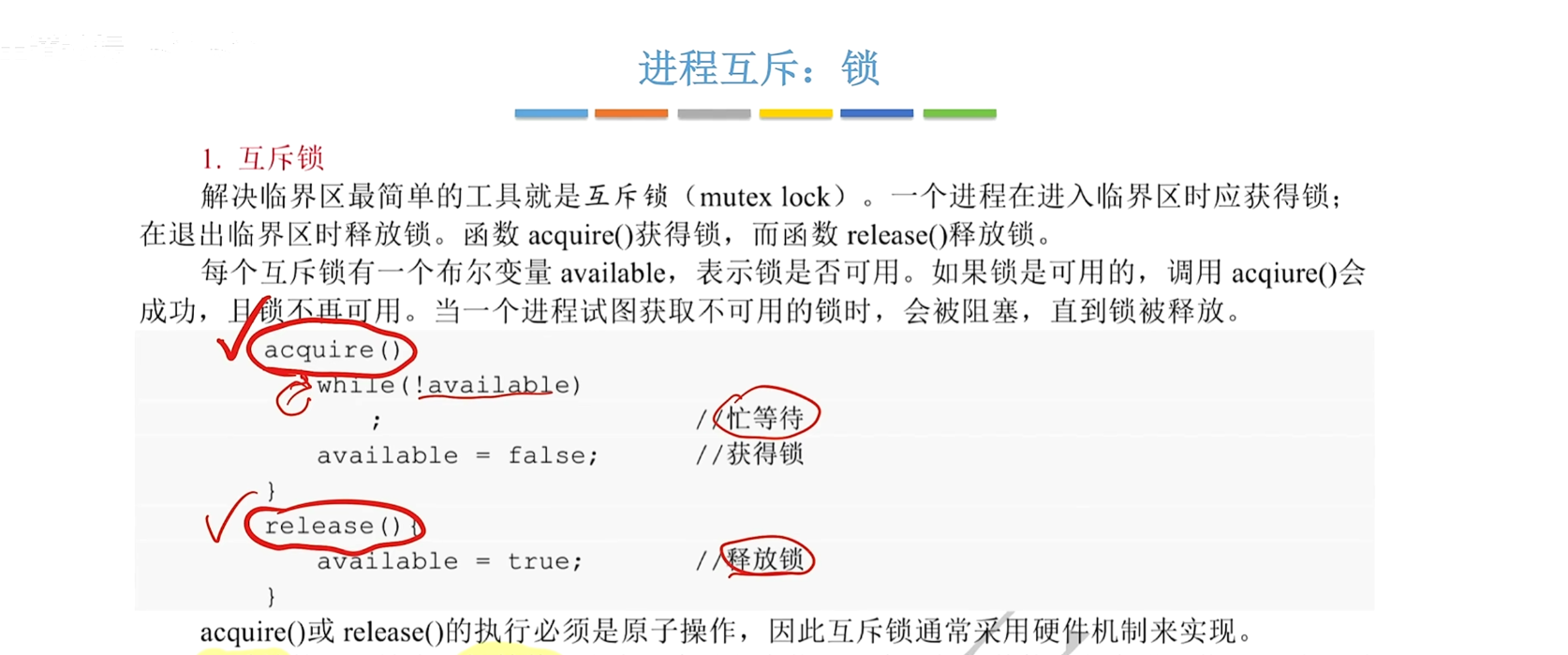
阻塞型互斥锁:放弃CPU,把自己挂起(阻塞),让CPU去执行其他进程,等锁可用时再被唤醒。
- 适用于:临界区较长或单处理器的场景。
自旋型互斥锁:进程在等待锁期间没有上下文切换(即不进入等待队列),CPU空转,忙等。
- 忙等: 即B也会使用CPU进程(时间片到期),但是B做不了事情,造成CPU空转,A又少了些许的CPU执行时间。
- 违背原则:“让权等待”。
- 适用于:临界区极短且多处理器的场景。
- 自旋锁的底层实现:可以是TSL指令,swap指令,单标志法。
- 优点:若持有锁的时间较短,则等待代价较低。
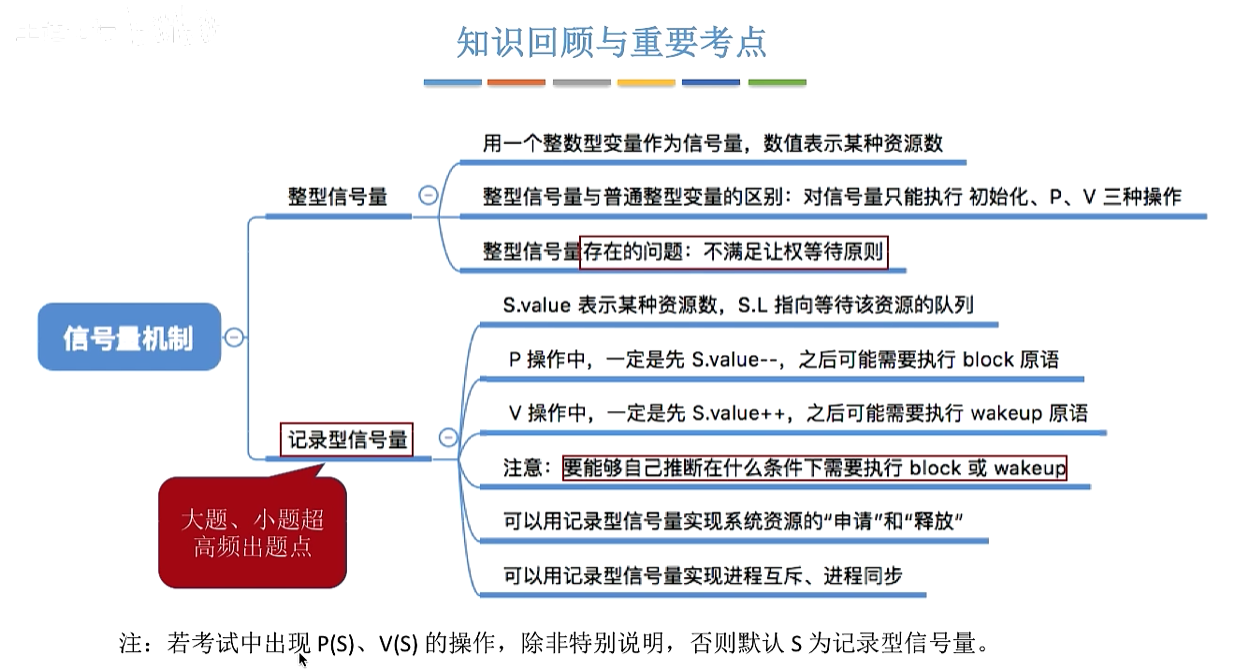
信号量机制
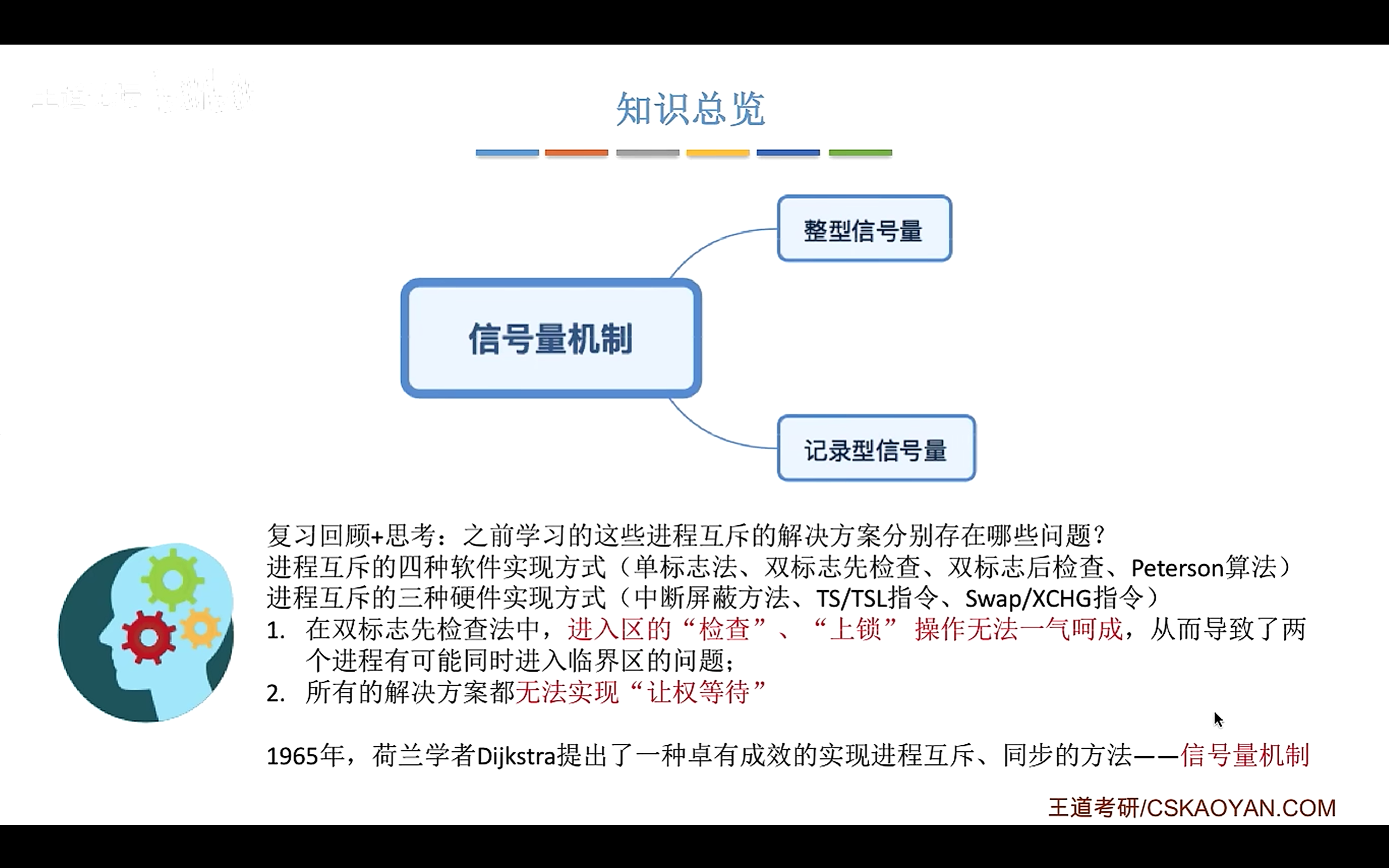
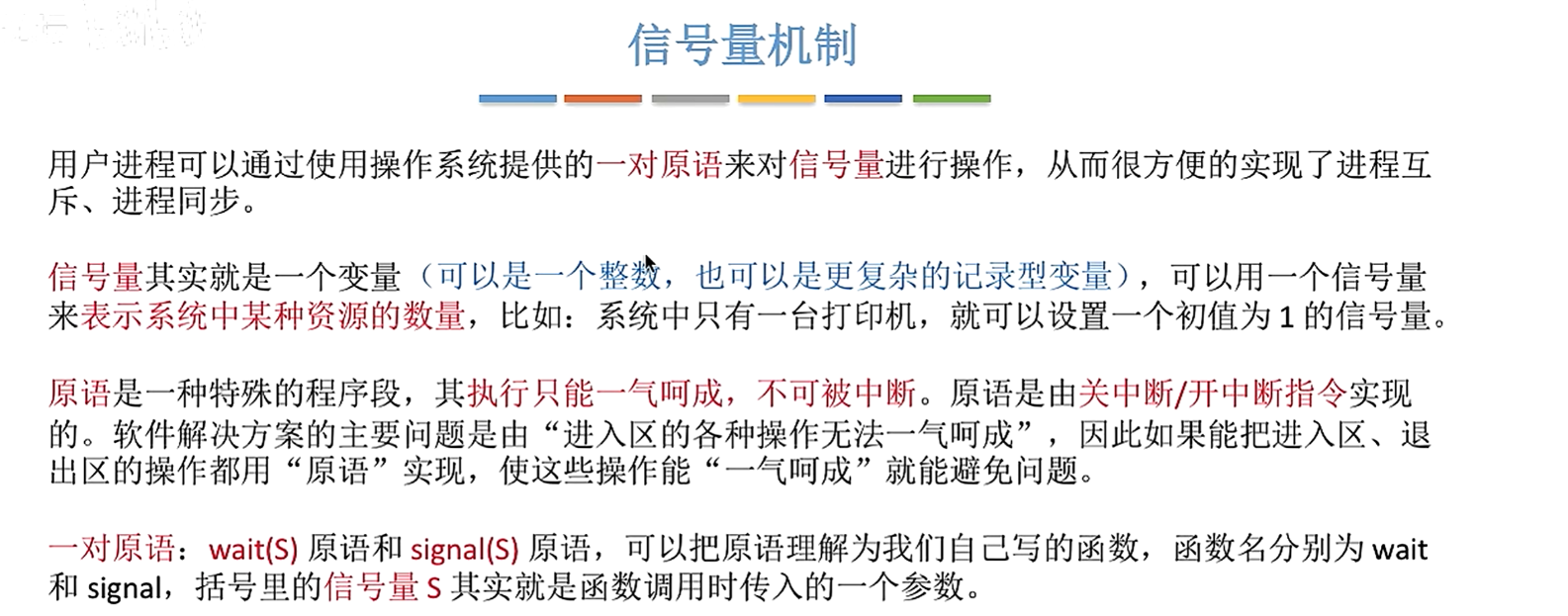
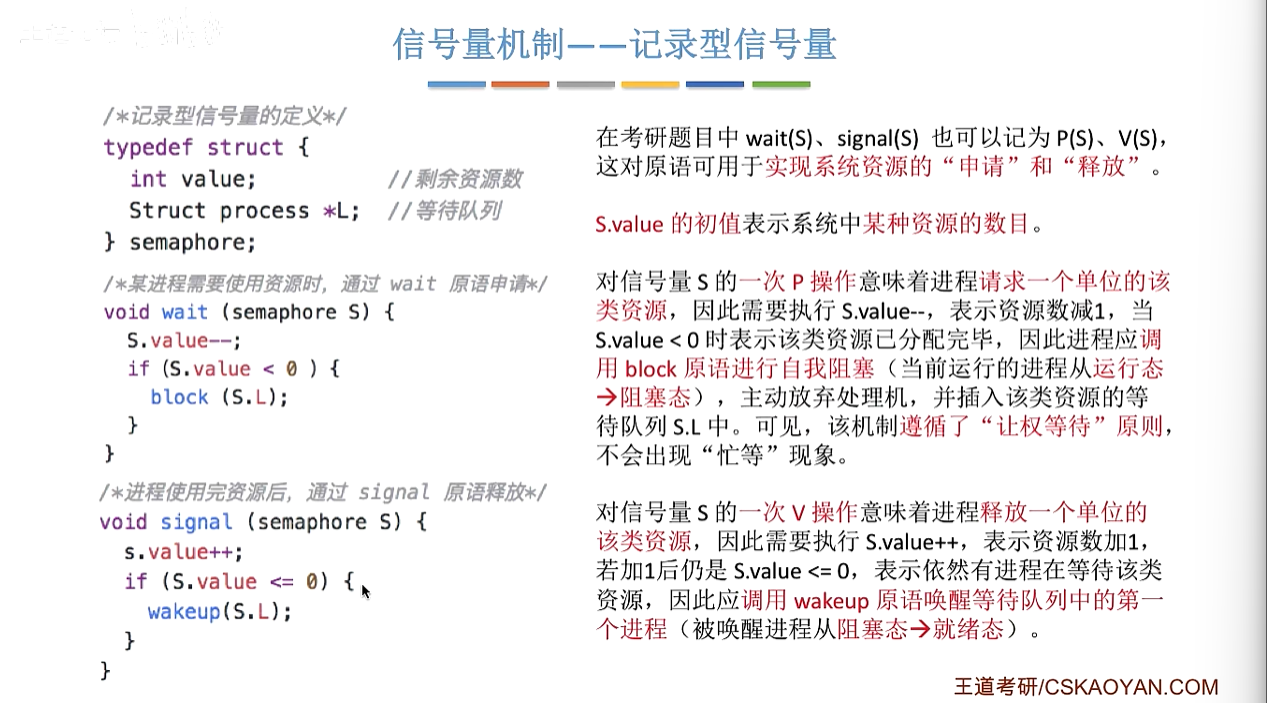
用户进程提供一对 原语(P,V) 来对信号量进行操作。
信号量不同于普通的变量,对信号量的操作只有:初始化,P,V三种。
P操作判断
if (S.value < 0)→ 阻塞(等于0时不阻塞是因为刚才拿了一个资源来用,现在才变成0的)V操作判断
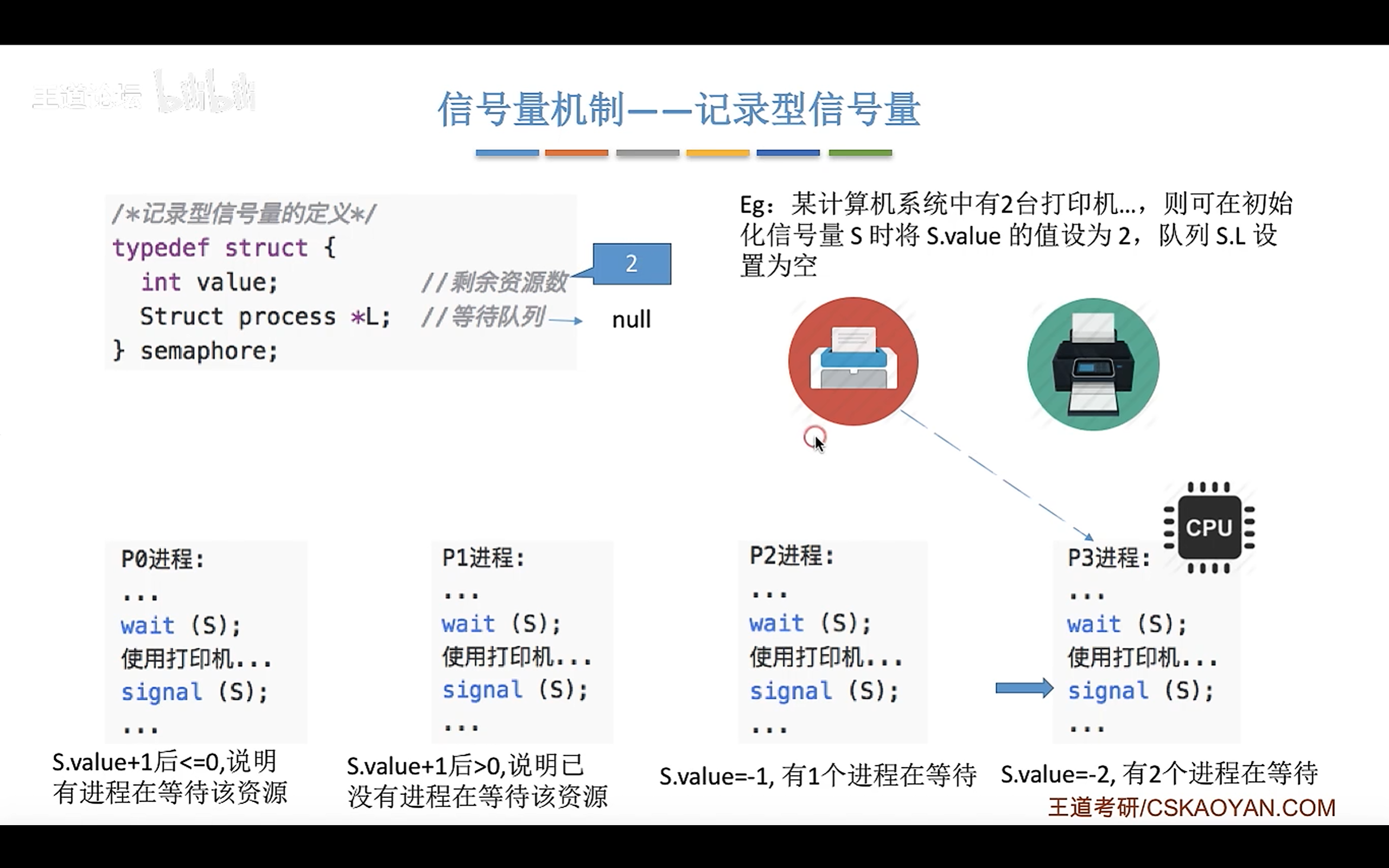
if (S.value <= 0)→ 唤醒(等于0时唤醒是因为刚才释放了一个资源,正好给等待队列里的第一个线程用)(说明刚刚起码是-1,有进程需要资源)
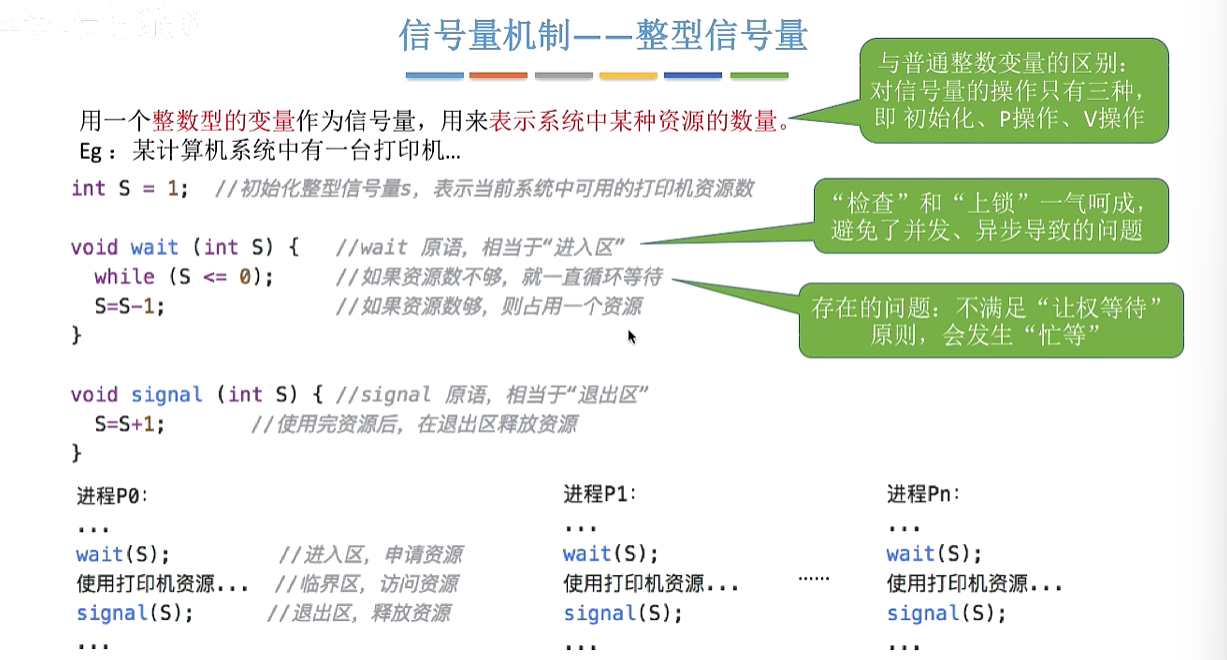
整型信号量
原理:和双标志先检查后上锁相同。但是实现了 检查和上锁 一气呵成。(避免进程同时在临界区的问题)
缺点:不满足“让权等待”,会发生忙等。
原语wait–检查+上锁,signal–释放
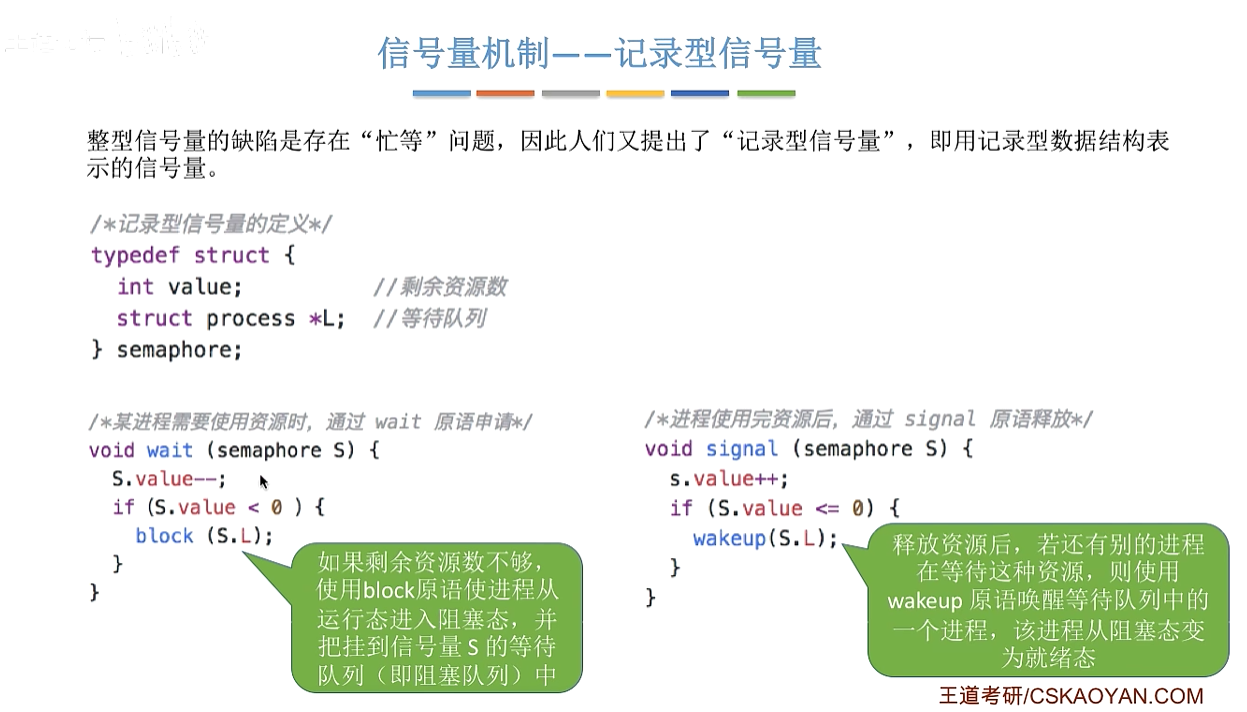
记录型信号量⭐
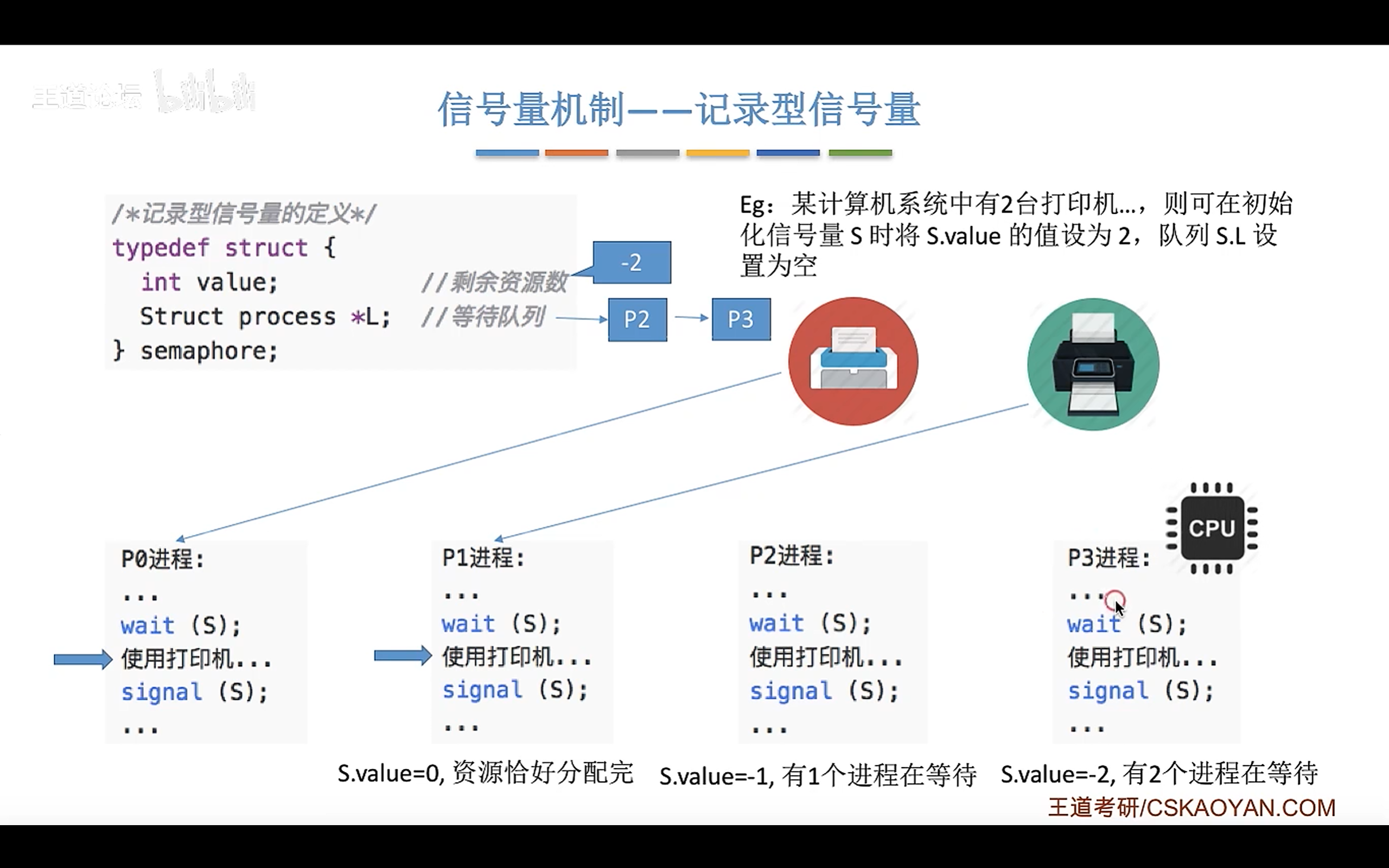
原理:S. value表示剩余资源数,S.L指向等待资源的队列。
优点:遵循了“让权等待”原则(解决“忙等”问题)
⭐左右两边都重要
EG
回顾
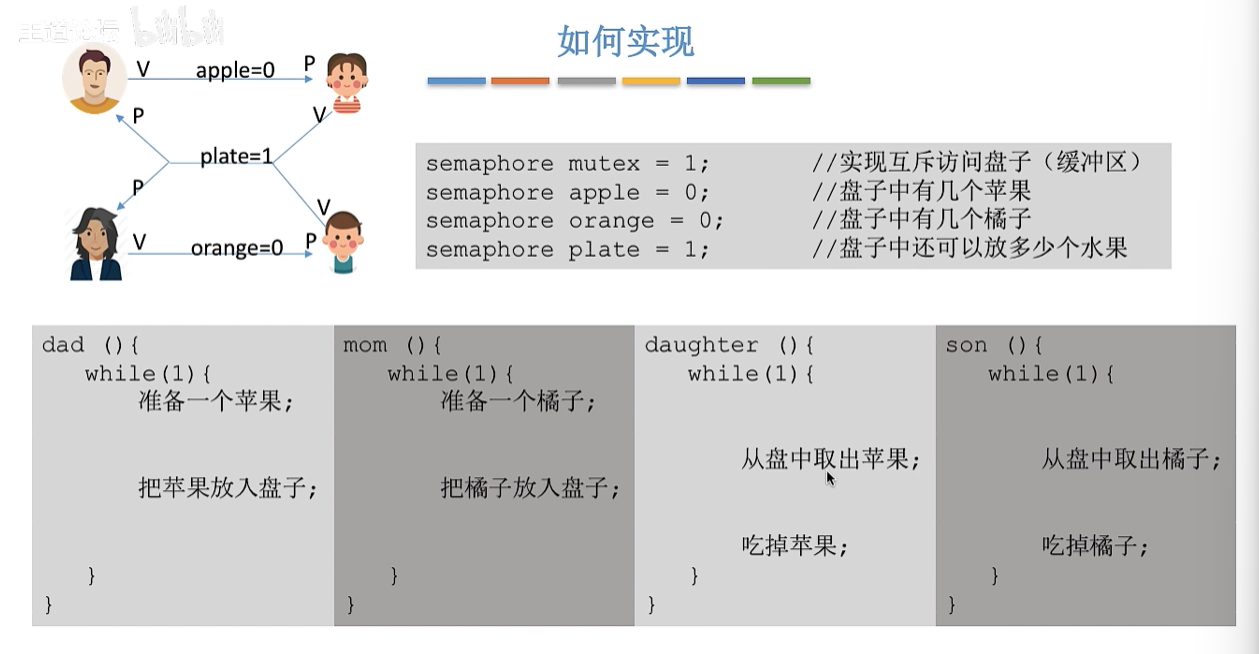
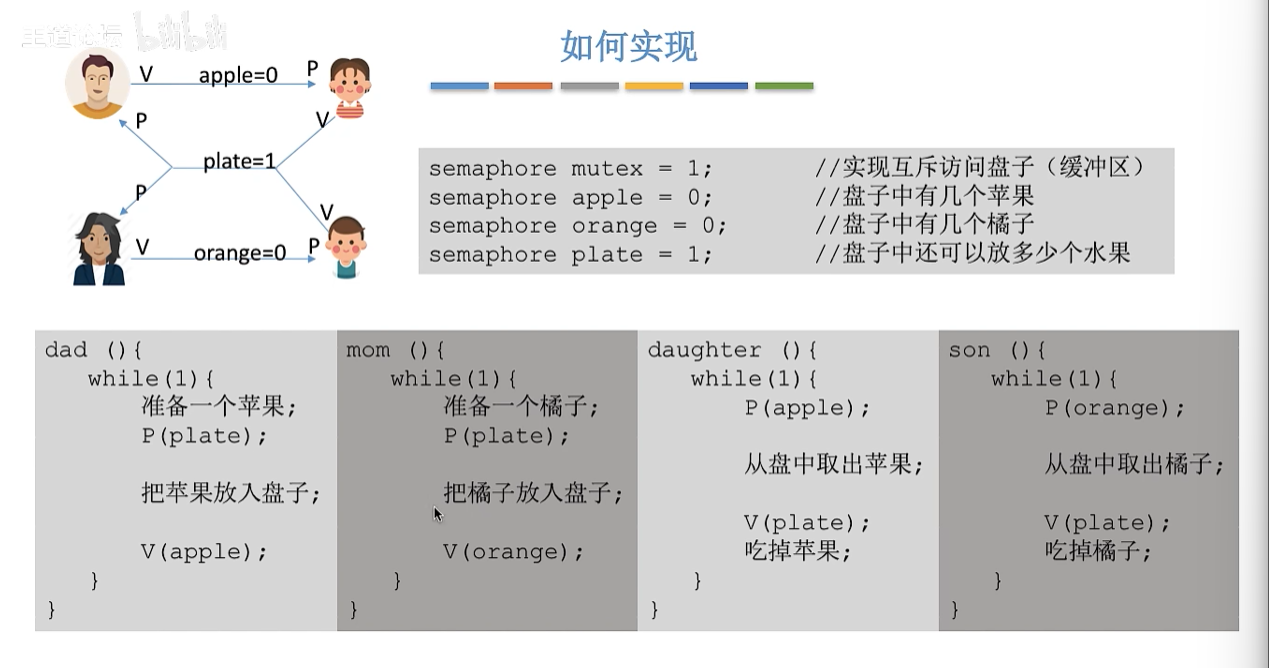
用信号量机制实现进程互斥、同步、前驱关系
P(s) – 申请一个进程S,如果资源不够就阻塞等待
V(s) – 释放一个资源S,如果有进程在等待该资源,则唤醒一个进程。
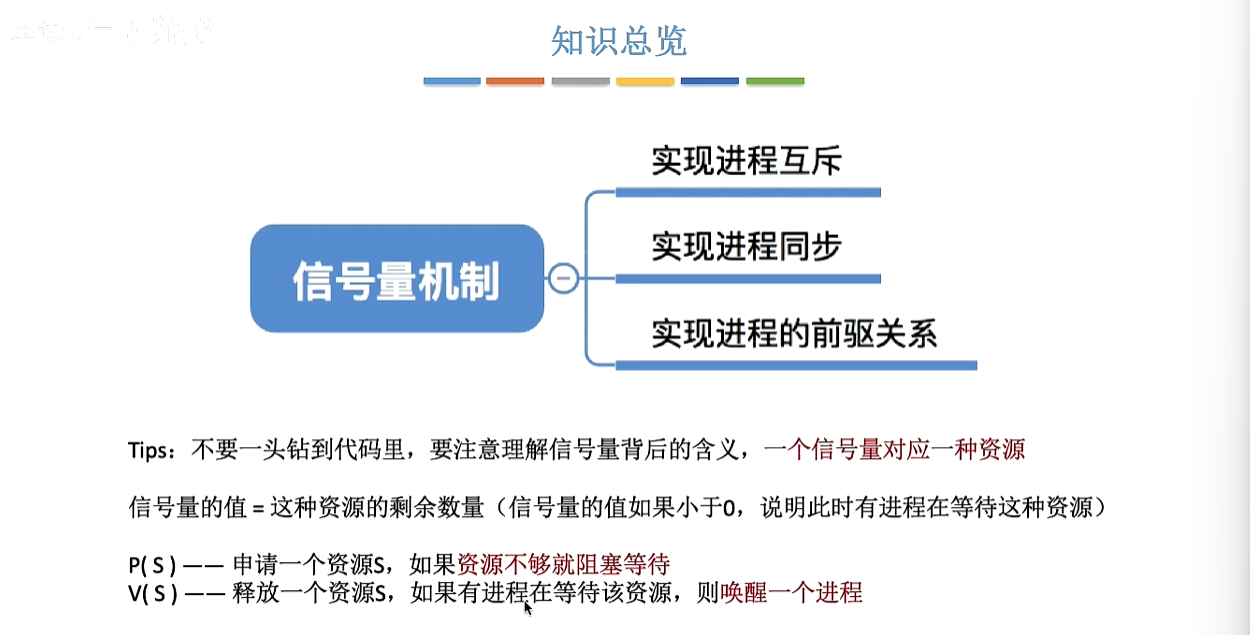
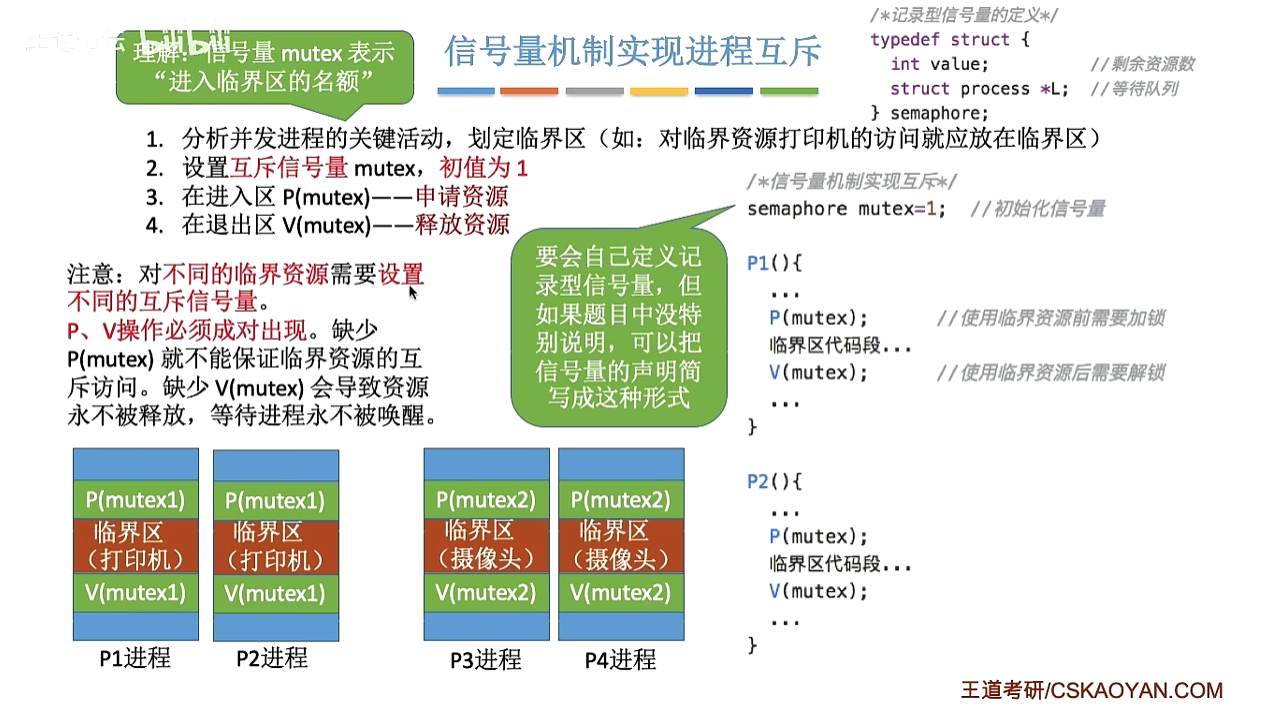
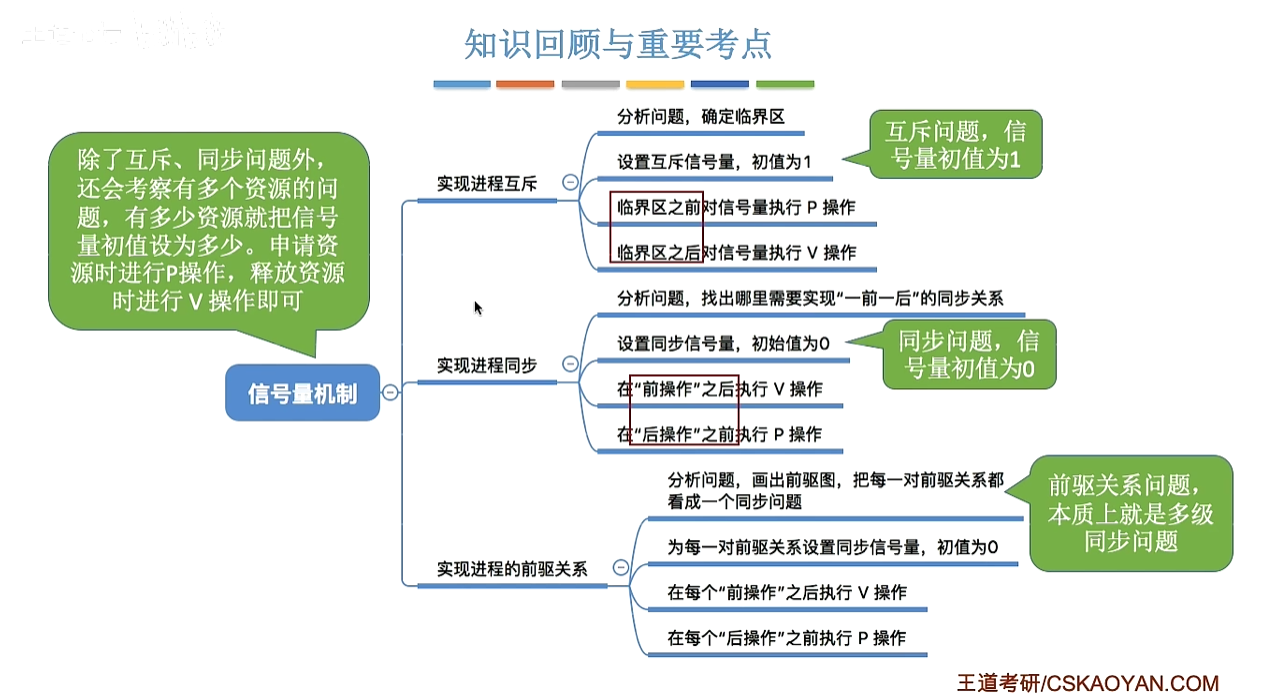
实现进程互斥
互斥信号量初始值为1。
临界区之前对信号量执行P操作。
临界区之后对信号量执行V操作。
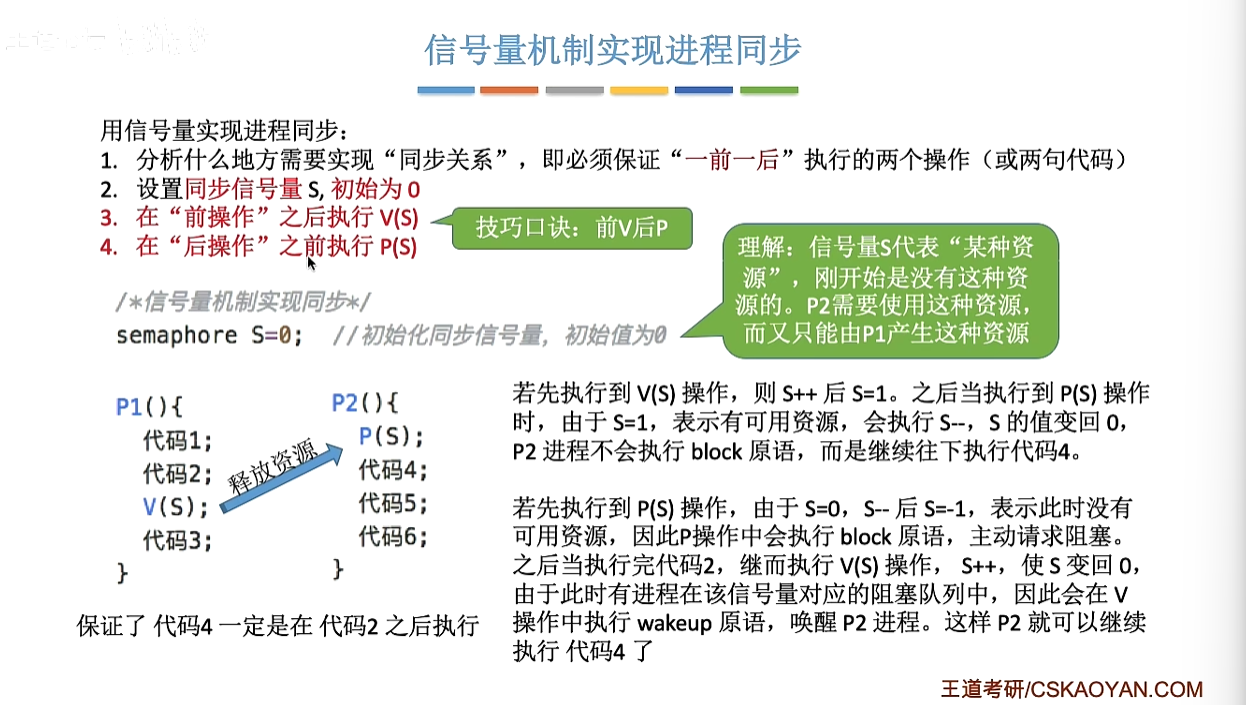
实现进程同步
同步:保证顺序执行。
同步信号量初始值为0。
临界区之前对信号量执行V操作。
临界区之后对信号量执行P操作。
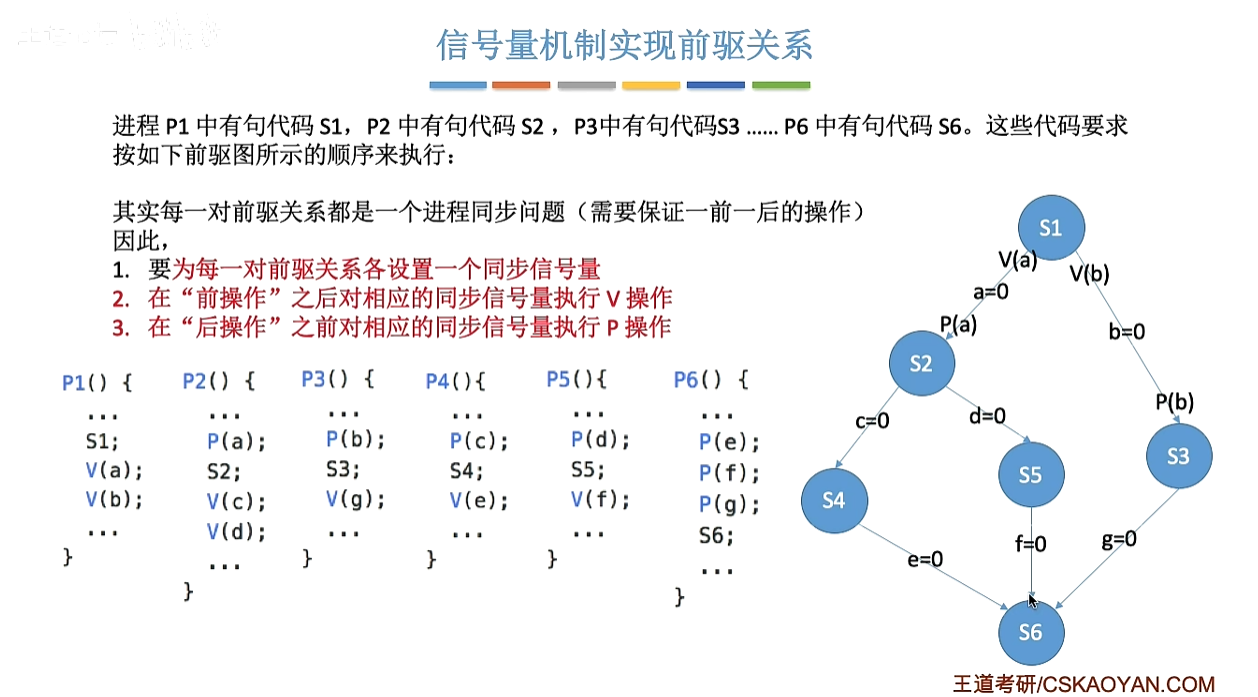
实现前驱关系
为每一对的前驱关系设置信号量,初始值为0。
在每一个“前操作”之后执行V操作
在每一个“后操作”之前执行P操作
回顾
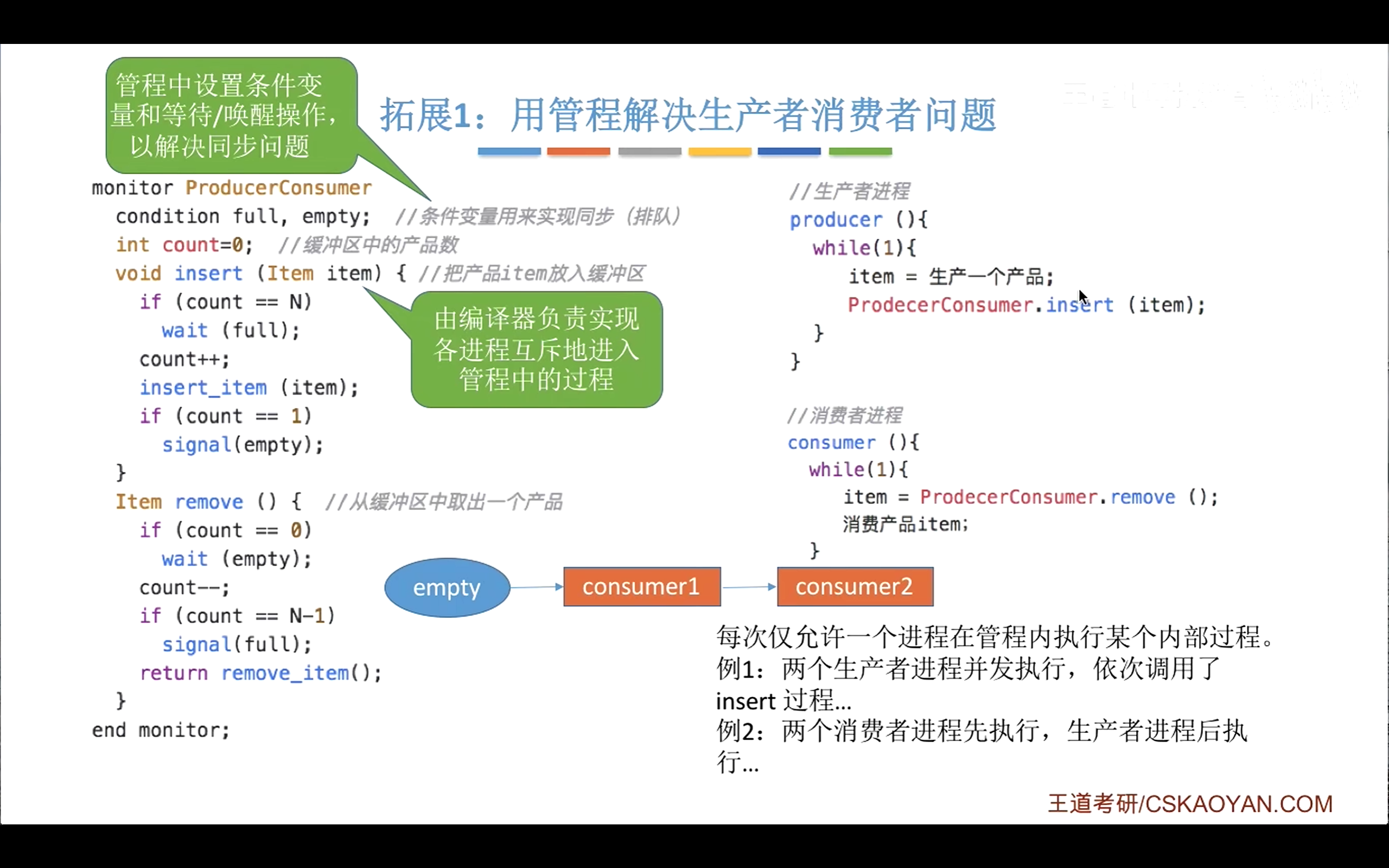
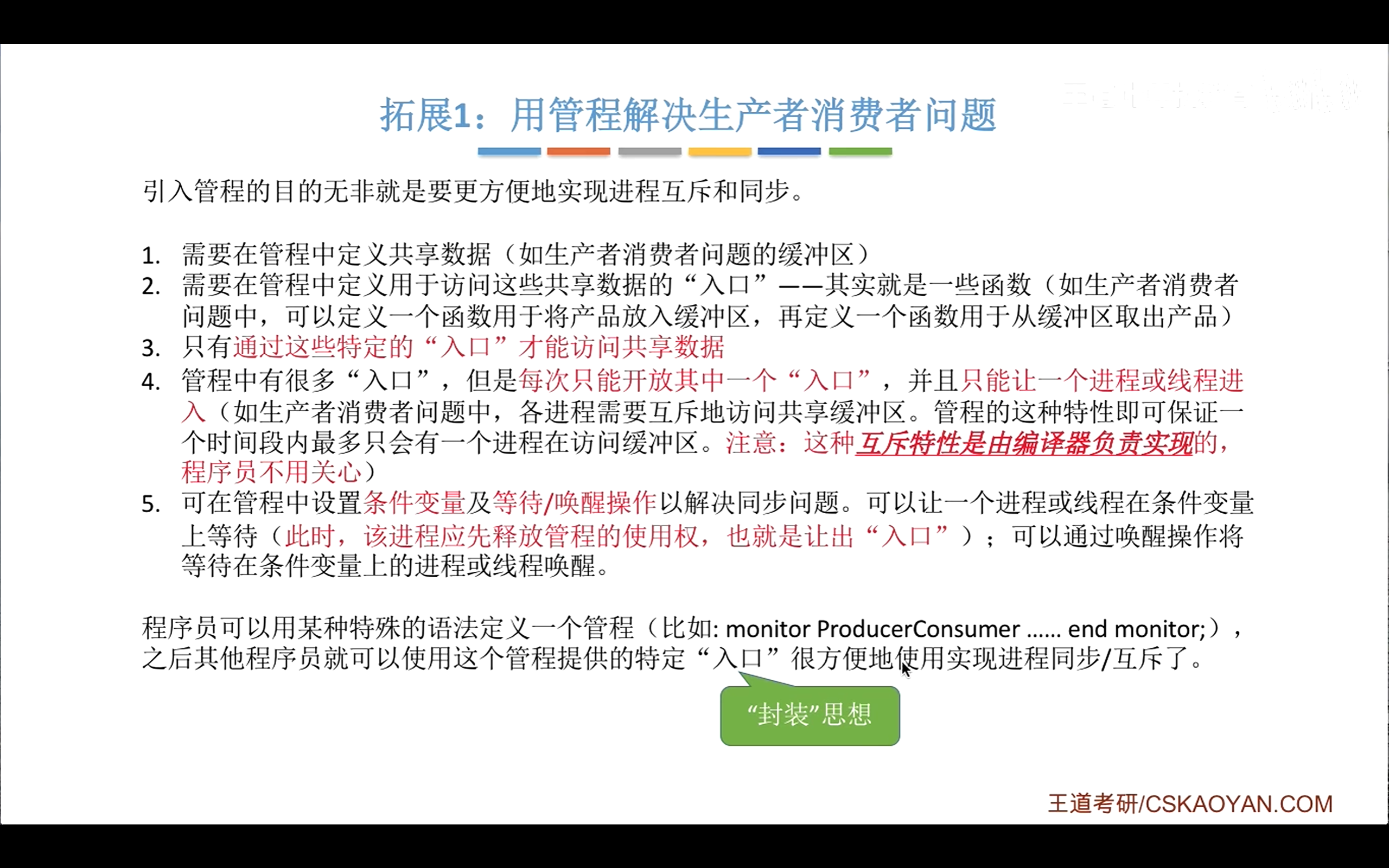
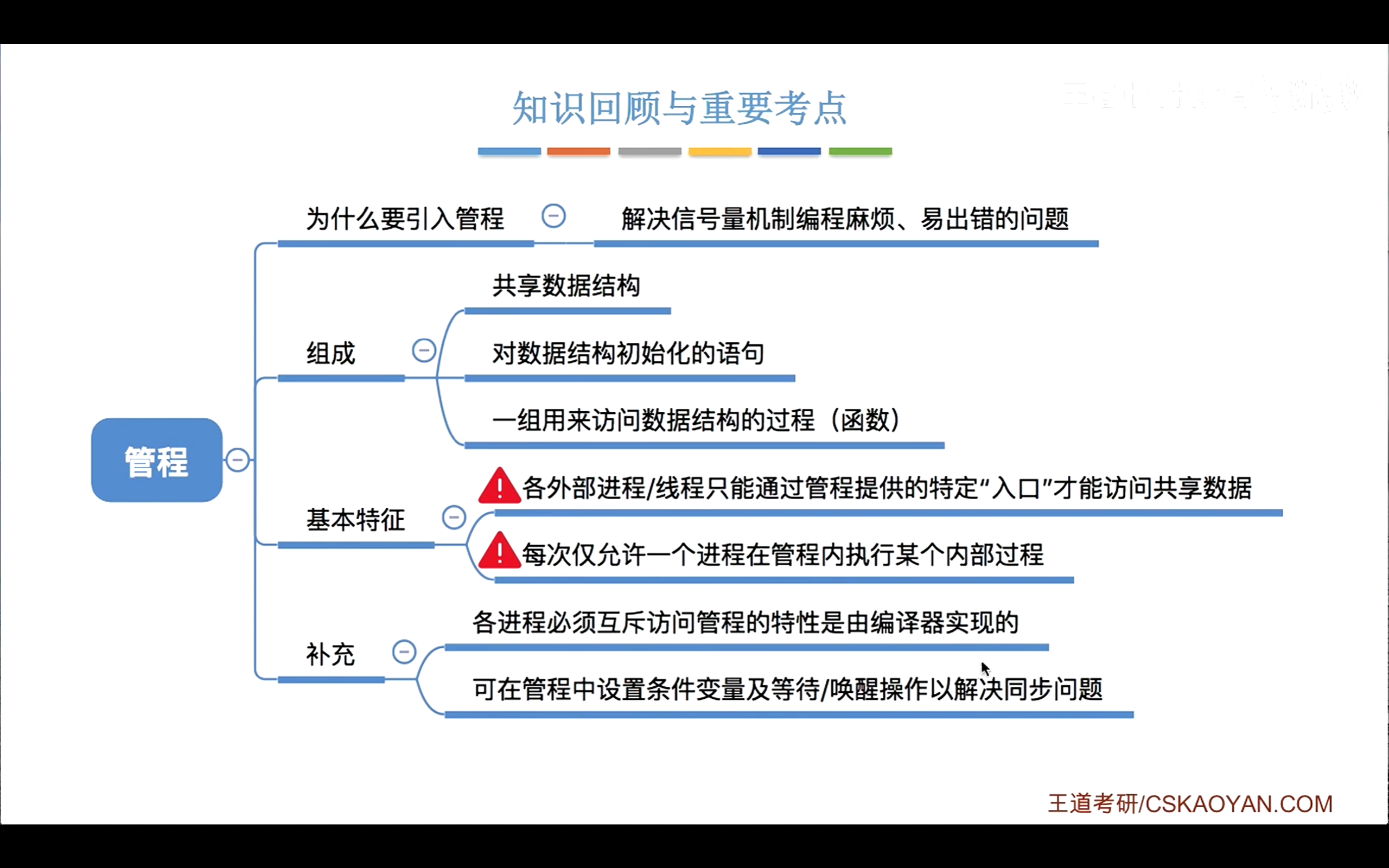
管程
信号量机制的缺点:编写程序困难,易出错,大量同步操作分散。
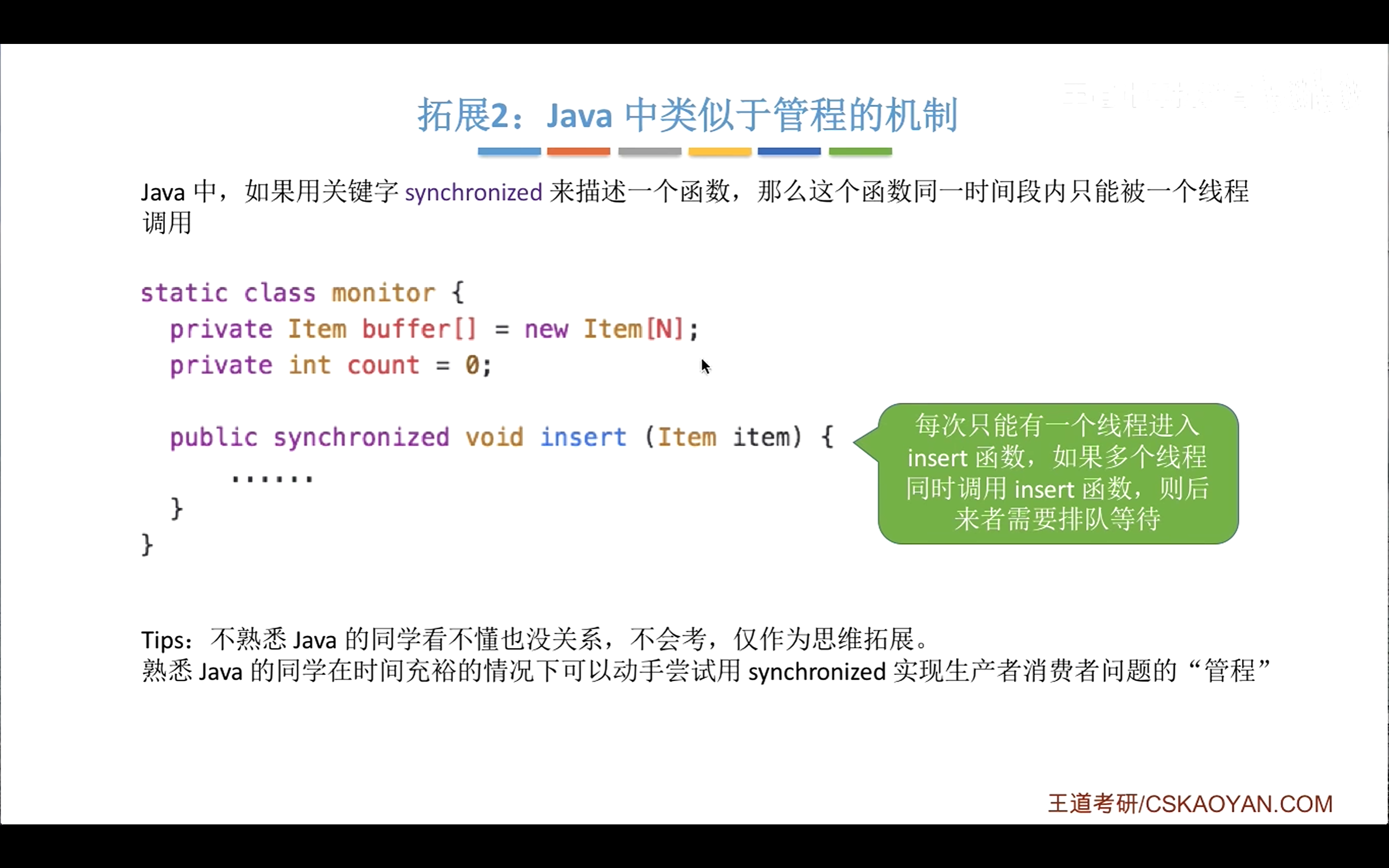
管程:不易出错,易编写。
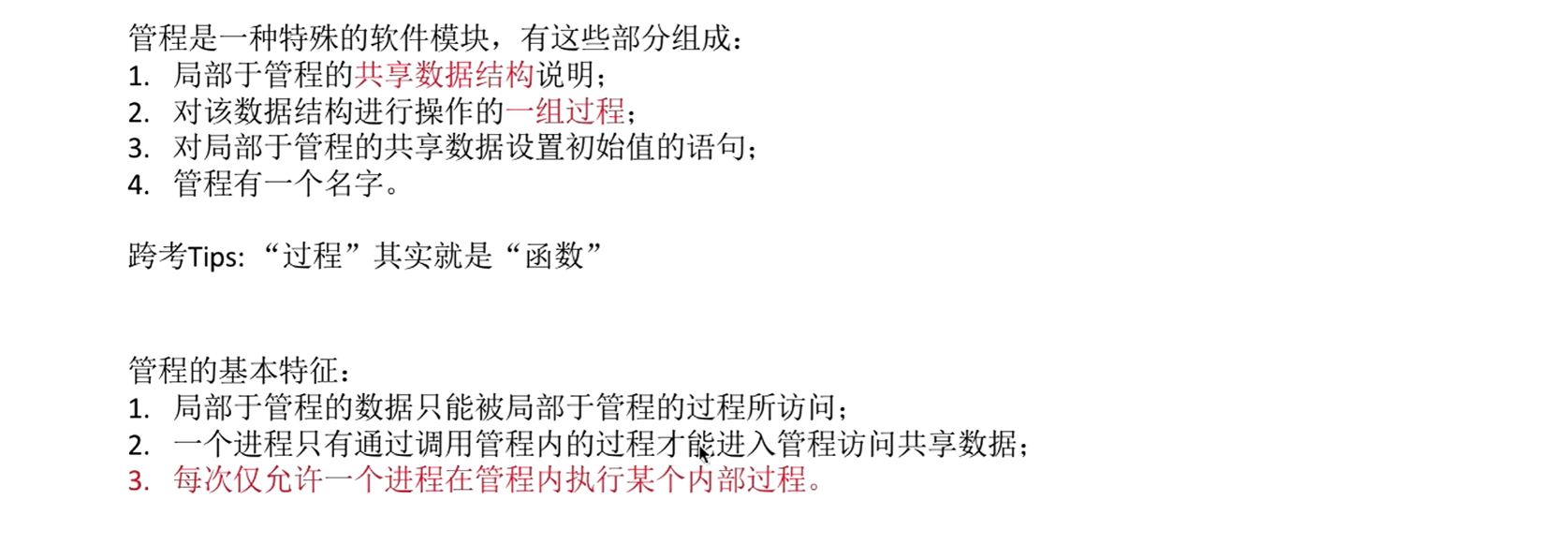
管程 VS 进程
进程拥有私有数据结构。管程管理的是公共数据结构。
进程是主动调用的实体。管程是被动调用的模块。
进程具有动态的生命周期,管程是os中的静态资源管理模块,仅供进程调用。
条件变量
将不同的阻塞原因分别抽象为独立的条件变量。
每个条件变量维护一个等待队列。
对条件变量仅支持两种操作:wait和signal。
条件变量 VS 信号量
相似:wait和signal操作和PV操作都可以实现进程的阻塞与唤醒。
不同:
信号量具有整数值,反映可用资源数量。条件变量不维护数值,仅用于线程排队和通知。
资源数量由共享变量如S显示记录(PV操作一定会改变信号量的值)。条件变量只负责同步。(条件是否满足应该由共享数据判断 ,而不是依赖信号次数。)
相当于封装,自己调函数就行
回顾
进程同步互斥问题
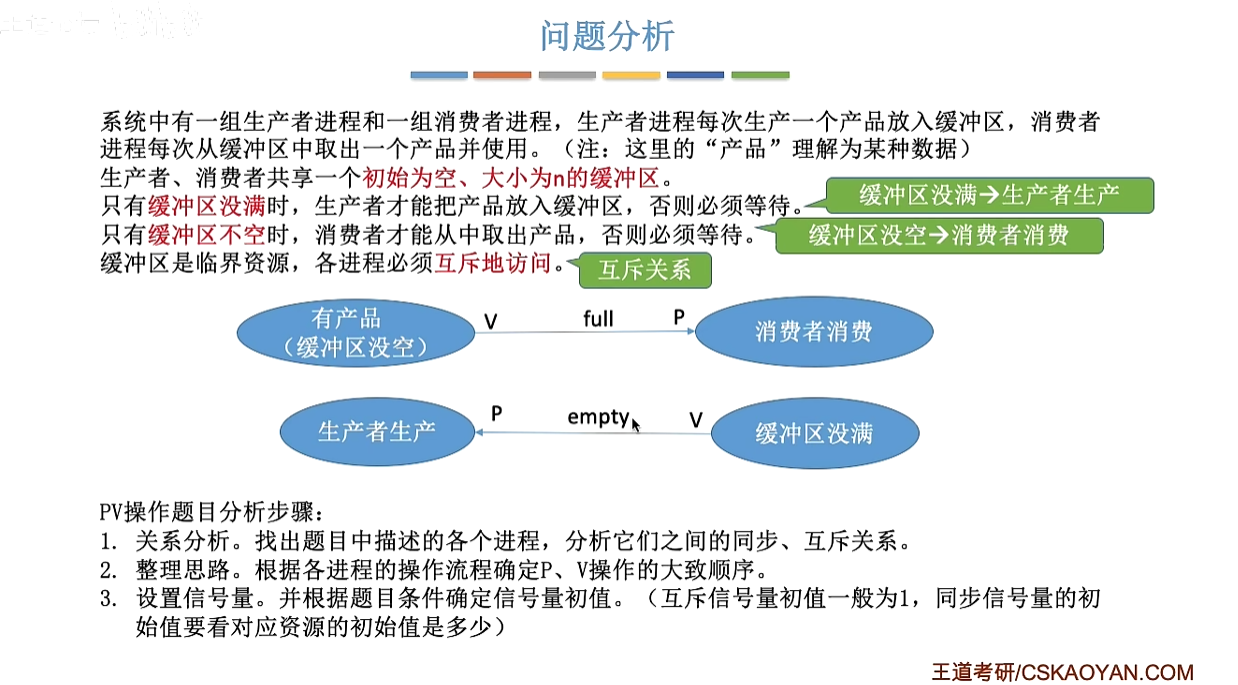
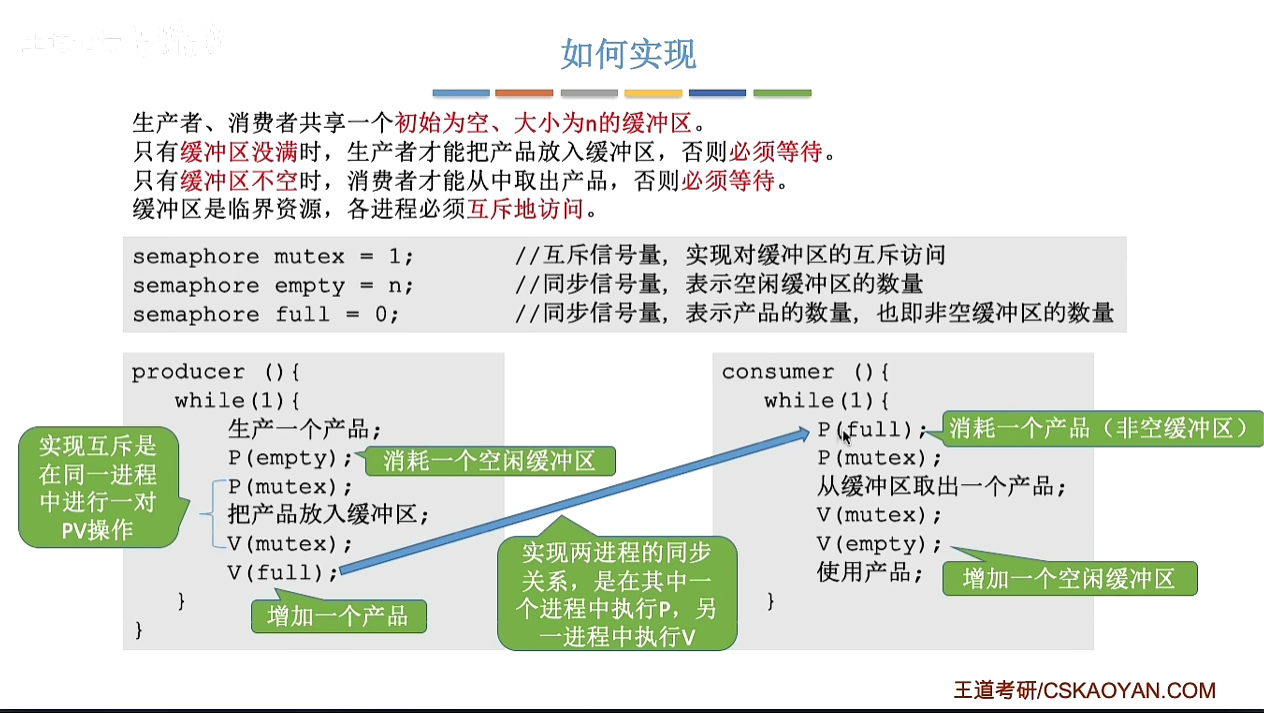
生产者消费问题
名词解释:
没有空缓冲区 = 缓冲区全满
没有满缓冲区 = 缓冲区全空
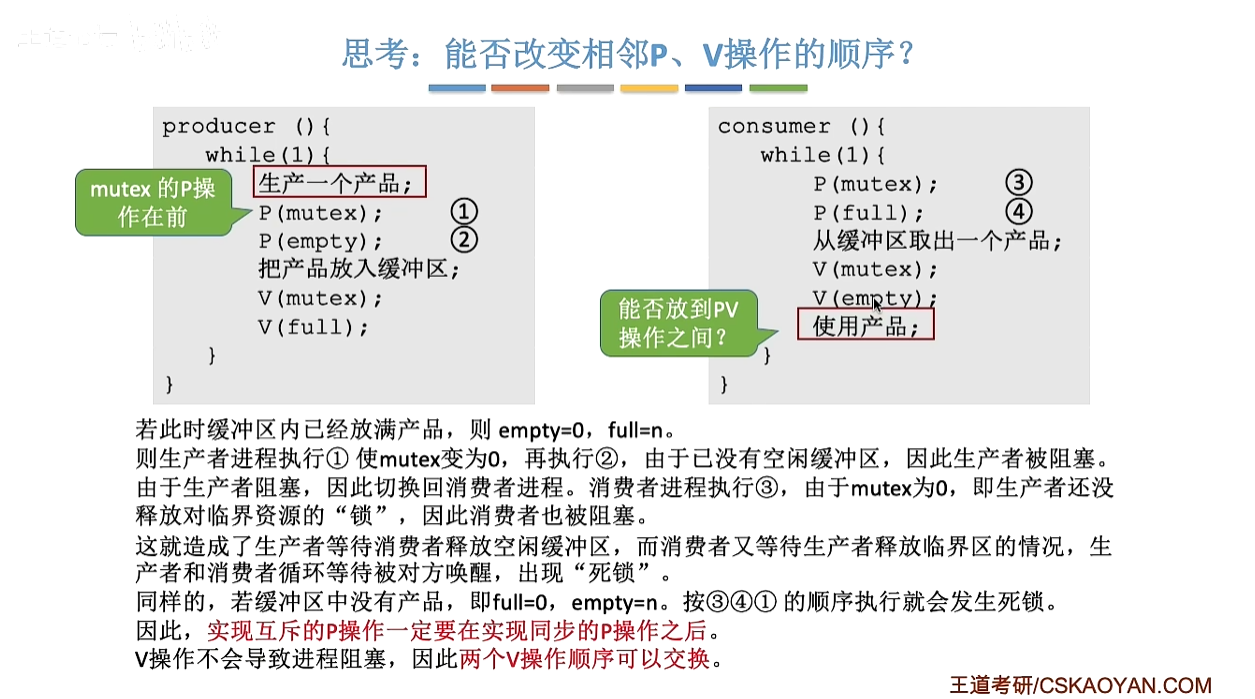
①不能改变相邻P操作的顺序:会造成死锁。
(死锁:如果已经没有空闲区了,生产者会被阻塞,切换成消费者进程,消费者在等待对方释放资源锁,也被阻塞了,进入阻塞队列。互相等待被对方唤醒 )
- 因此得,先执行同步P操作,再执行互斥P操作。(避免进程在持有互斥锁的同时等待资源)
②可以改变相邻V操作的顺序,不会造成进程阻塞。
不建议把处理内容都放入临界区,会造成临界区上锁时间长。
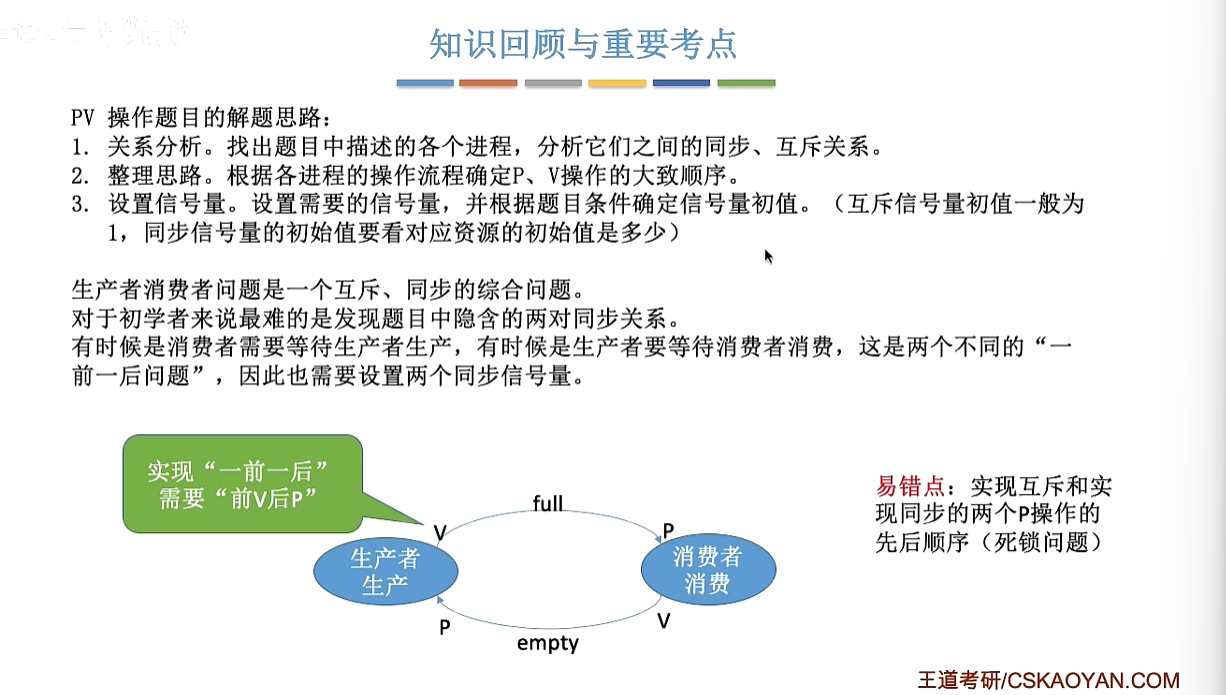
回顾
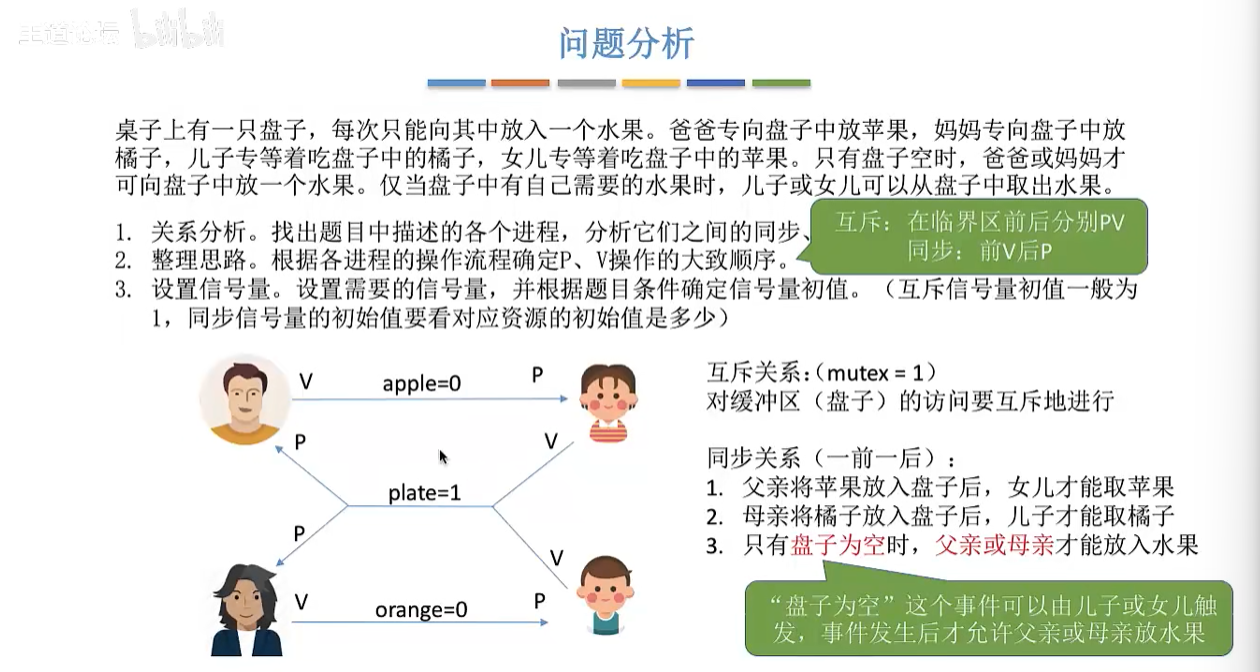
发现题目之间的同步,互斥关系。
确定PV顺序。
互斥信号量初值一般是1,同步信号量初值看资源初值是多少。
多(类)生产者-多(类)消费者
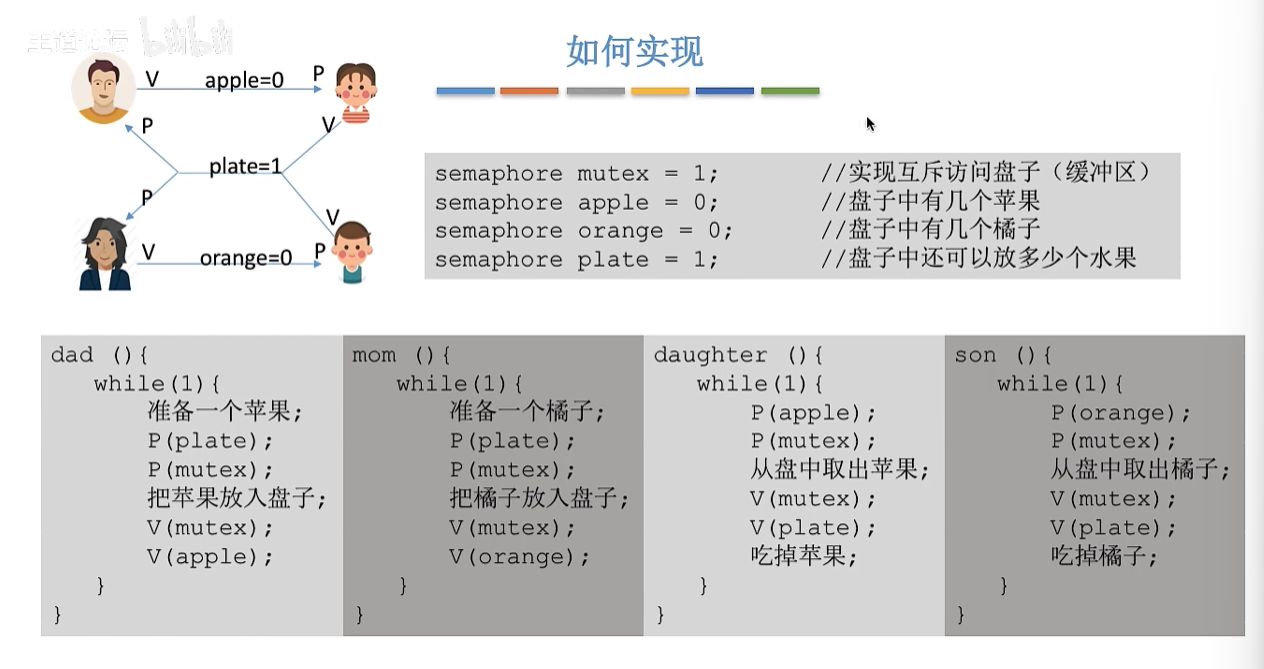
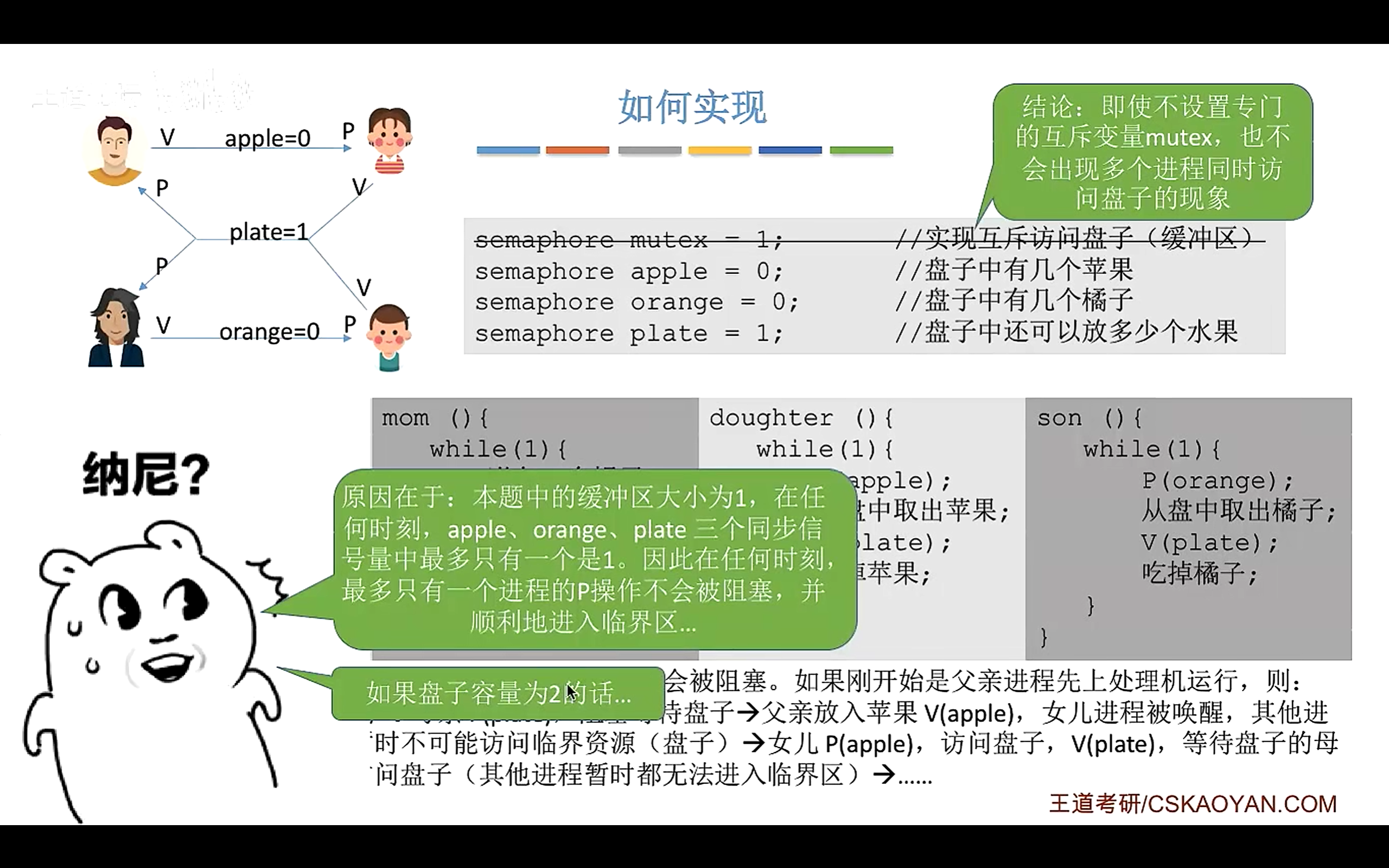
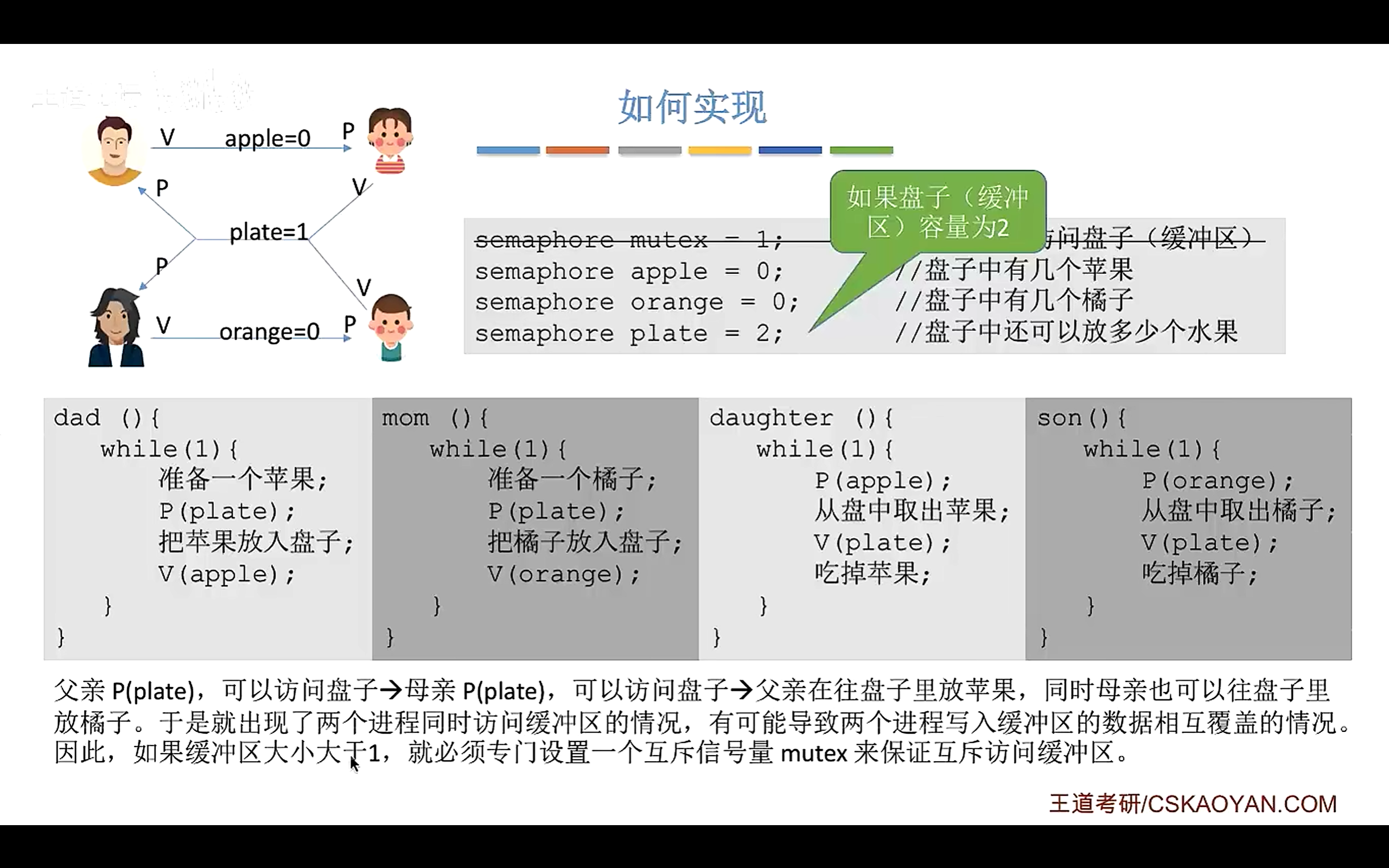
缓冲区为1,有可能,不用设置互斥信号量。
回顾
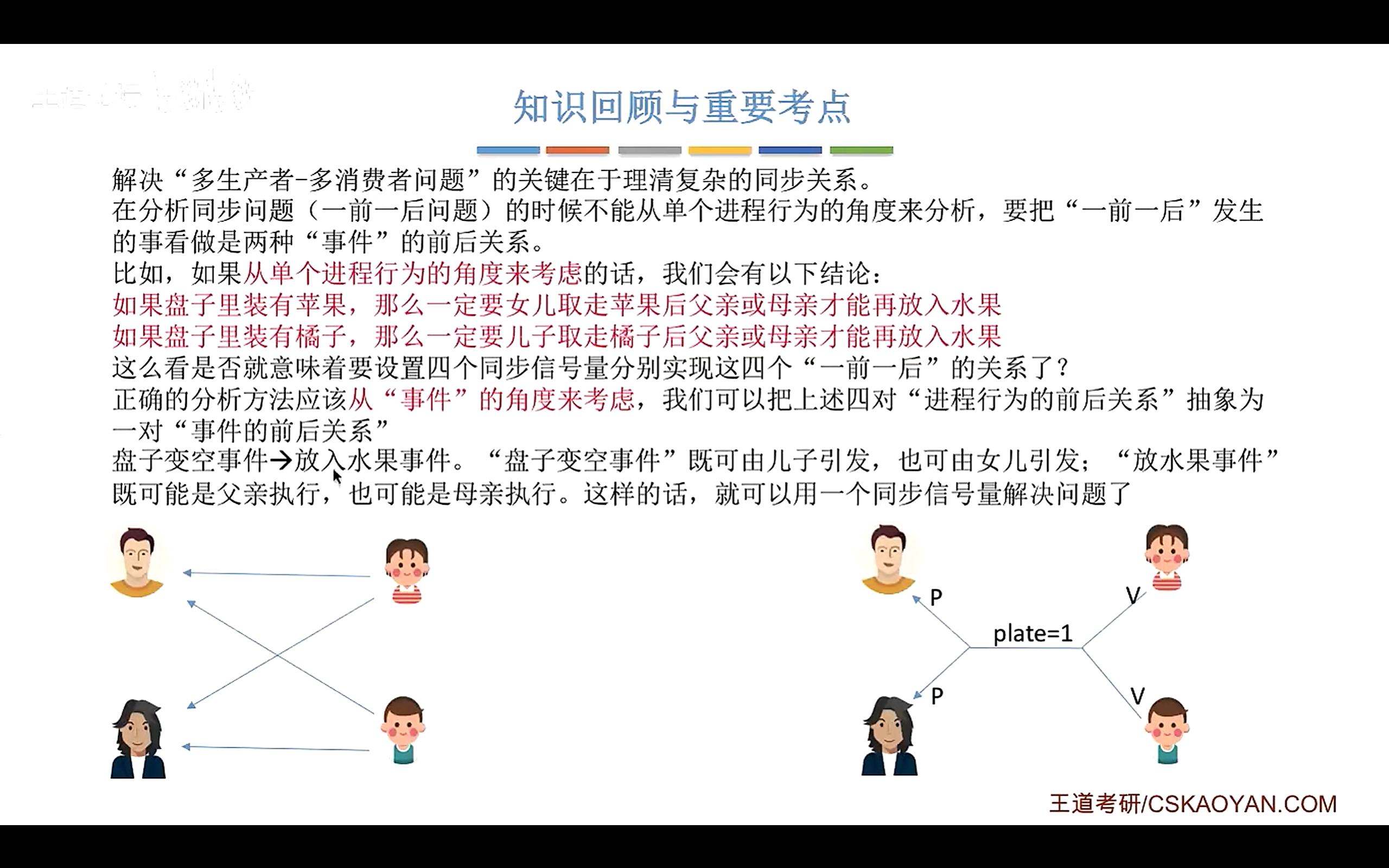
看成 事件 的先后关系(而不是进程的前后关系,这样子复杂)
读者-写者问题
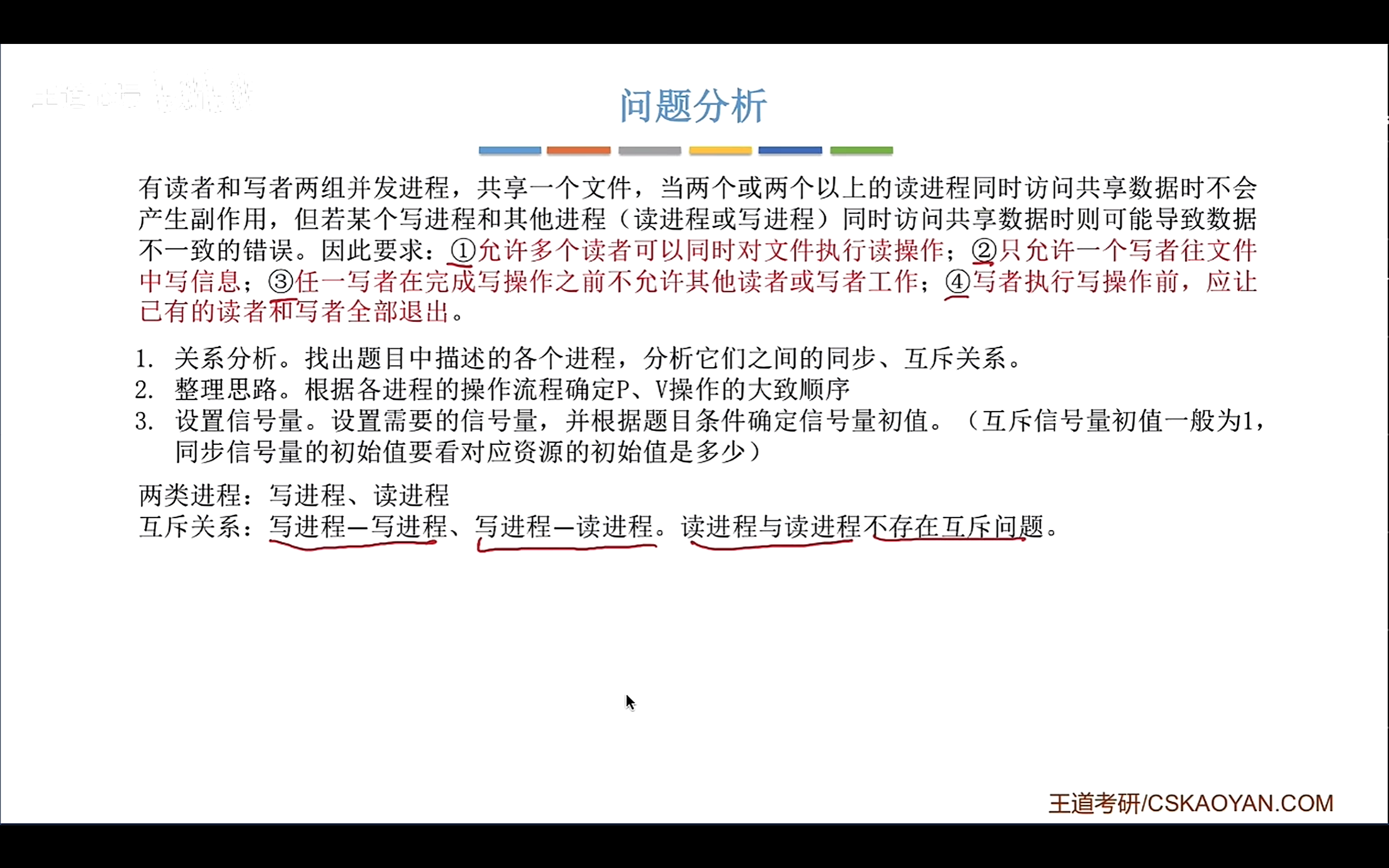
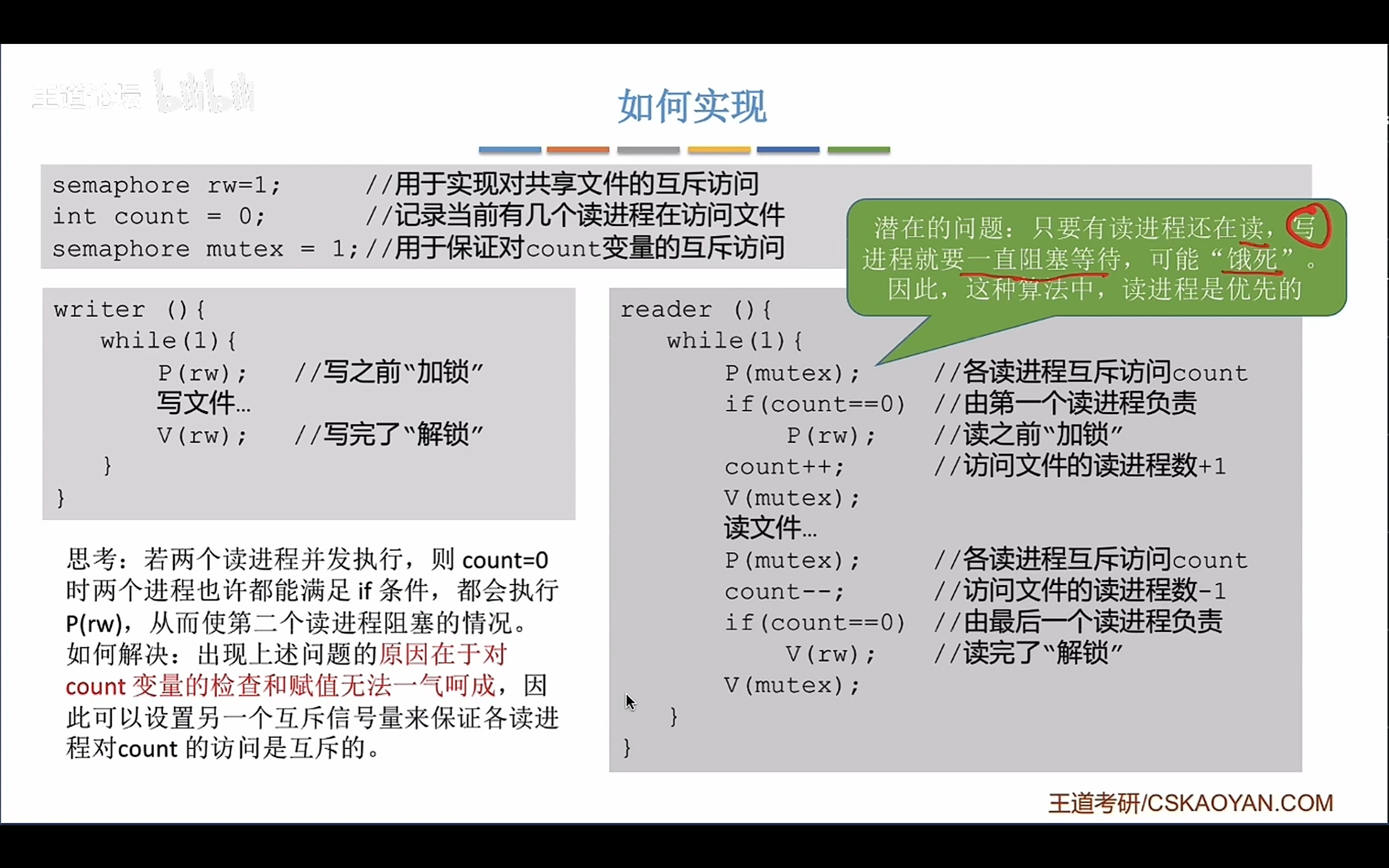
设置一个信号量mutex,保证读进程检查和上锁一体,保证不会在执行完检查(count==0)后被切换进程导致之后进不去进程。
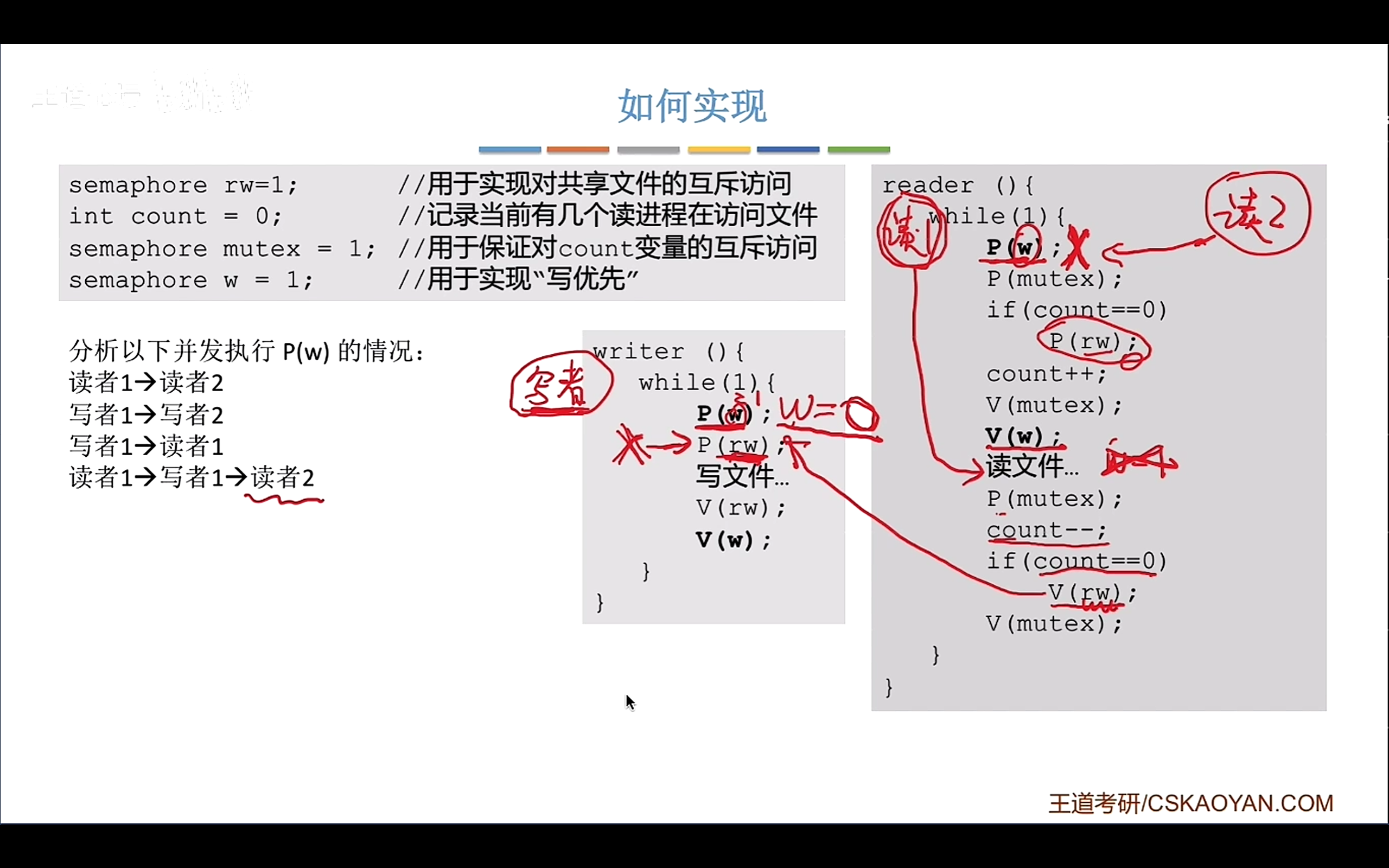
又有潜在的问题…写进程可能被“饿死”。
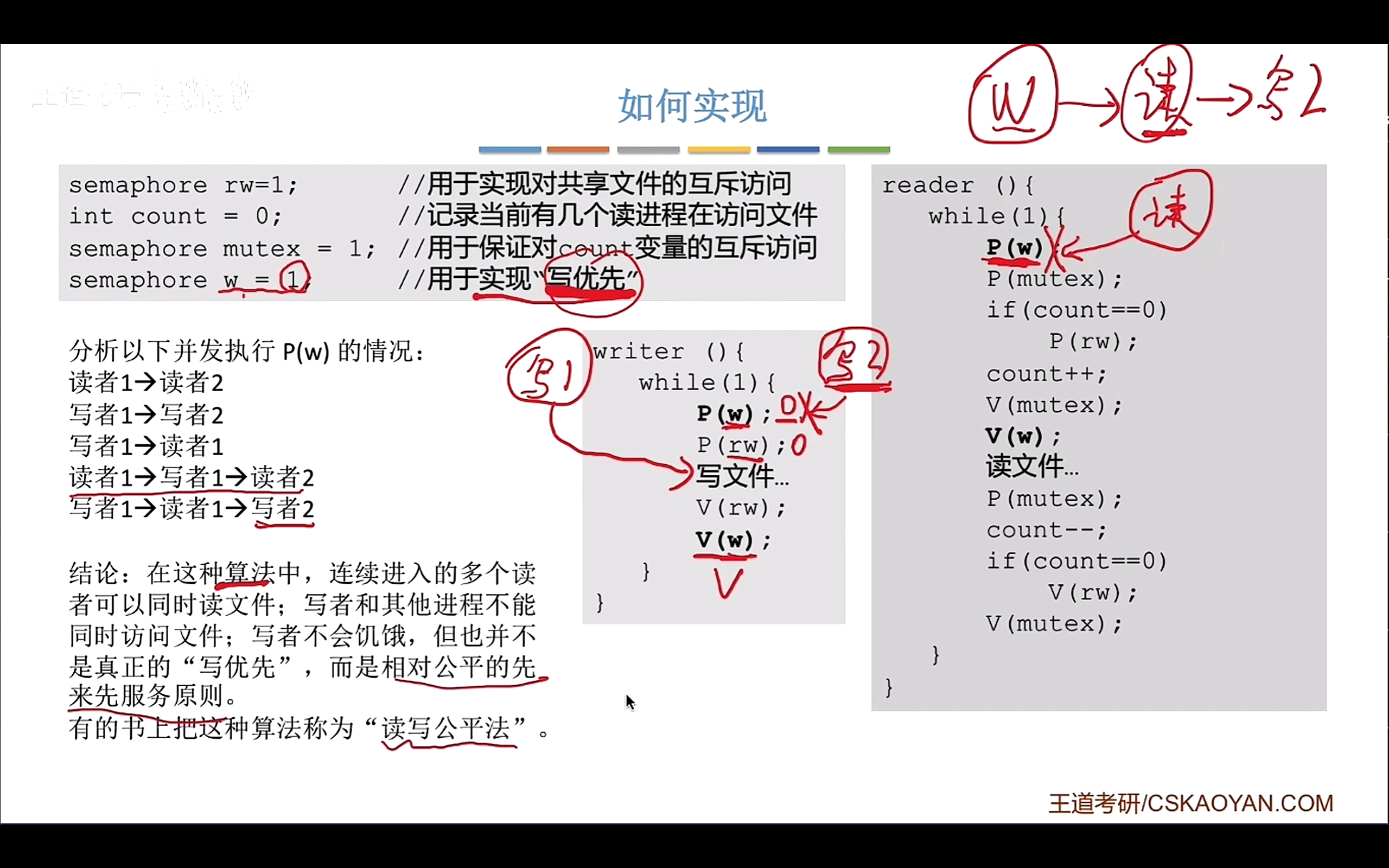
再设置一个信号量w,用于实现 “读写公平”(谁先来谁优先,而不是一直是读先)
(读者1完成,释放rw信号量,唤醒因为rw而阻塞的写进程)
回顾
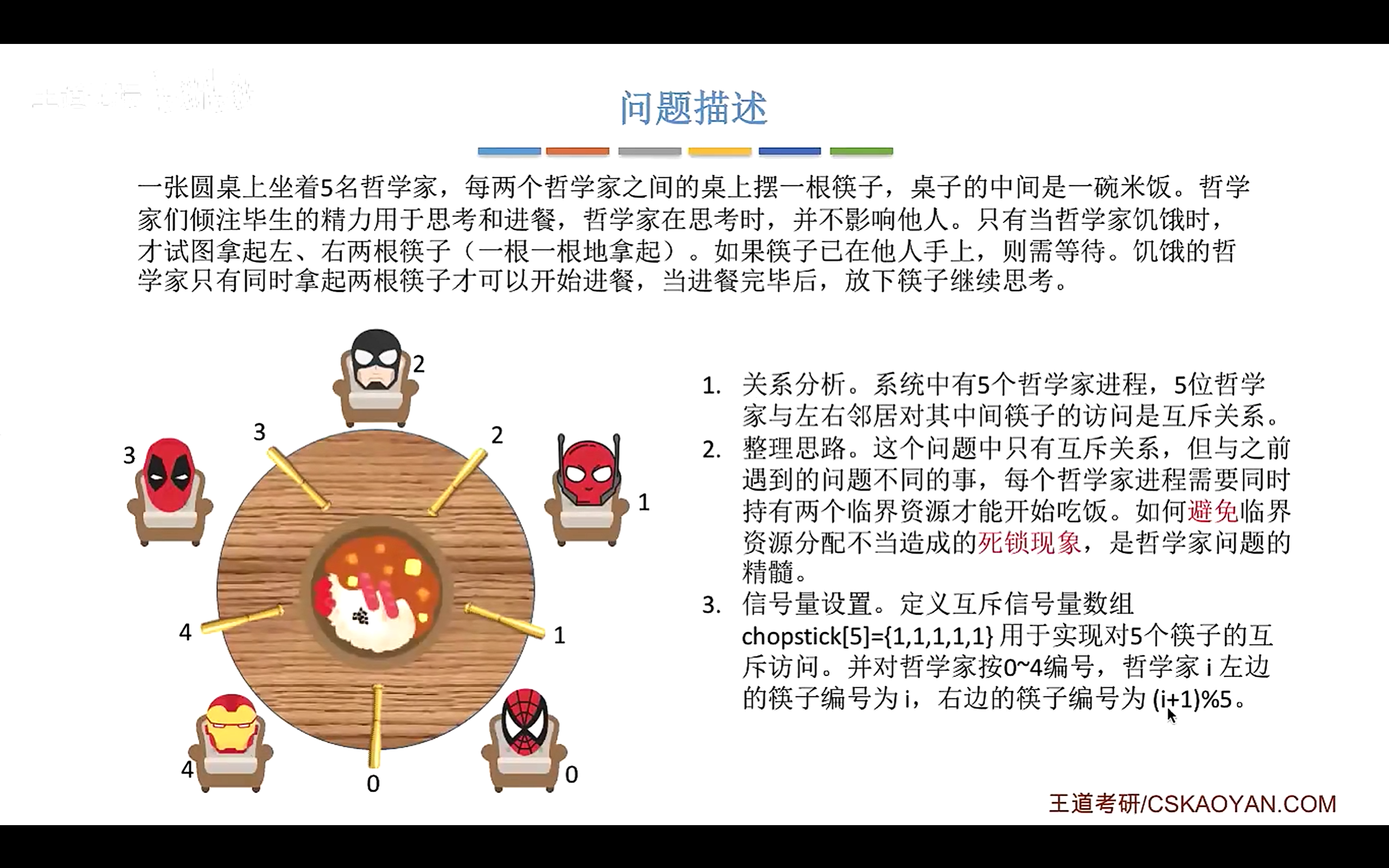
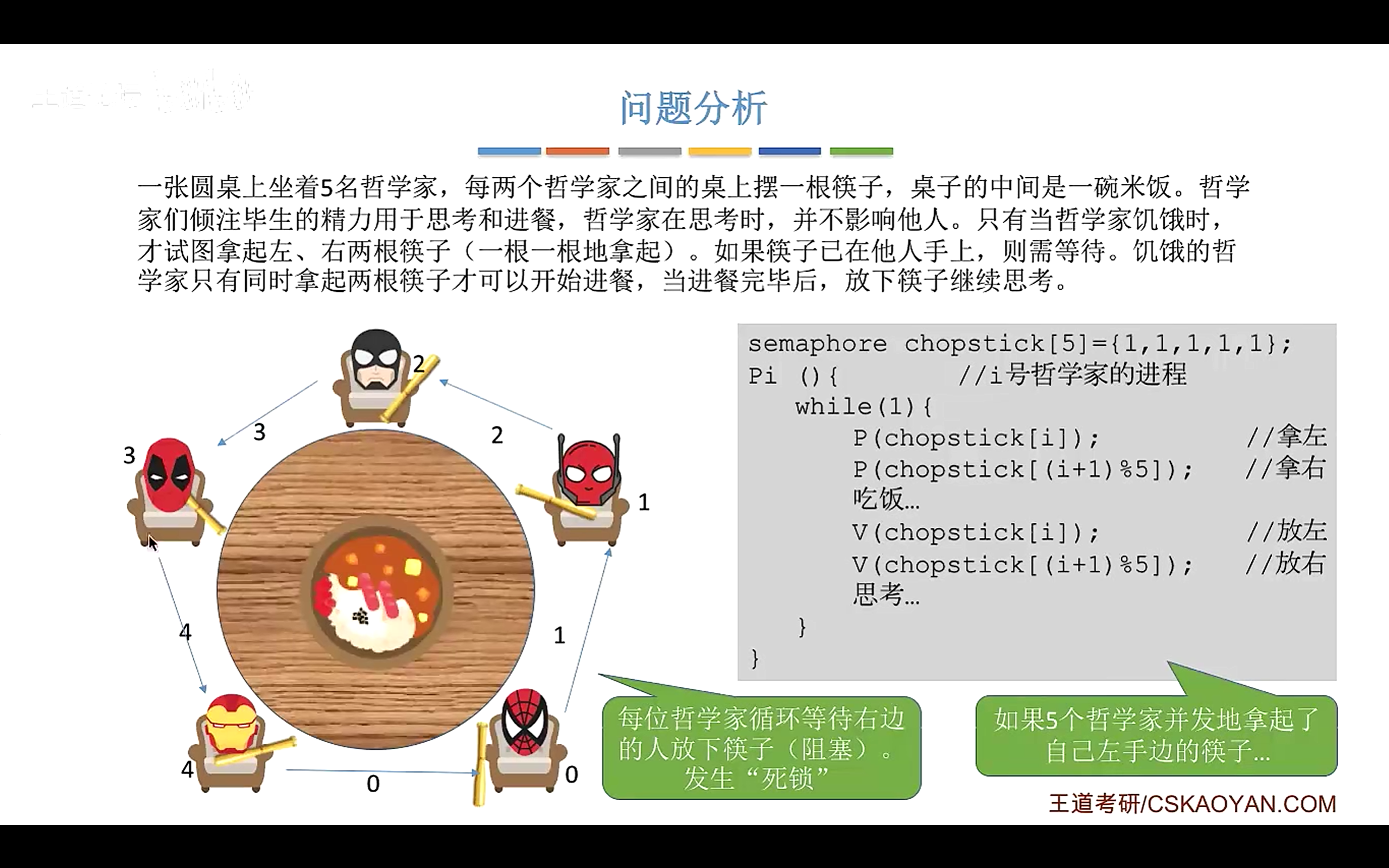
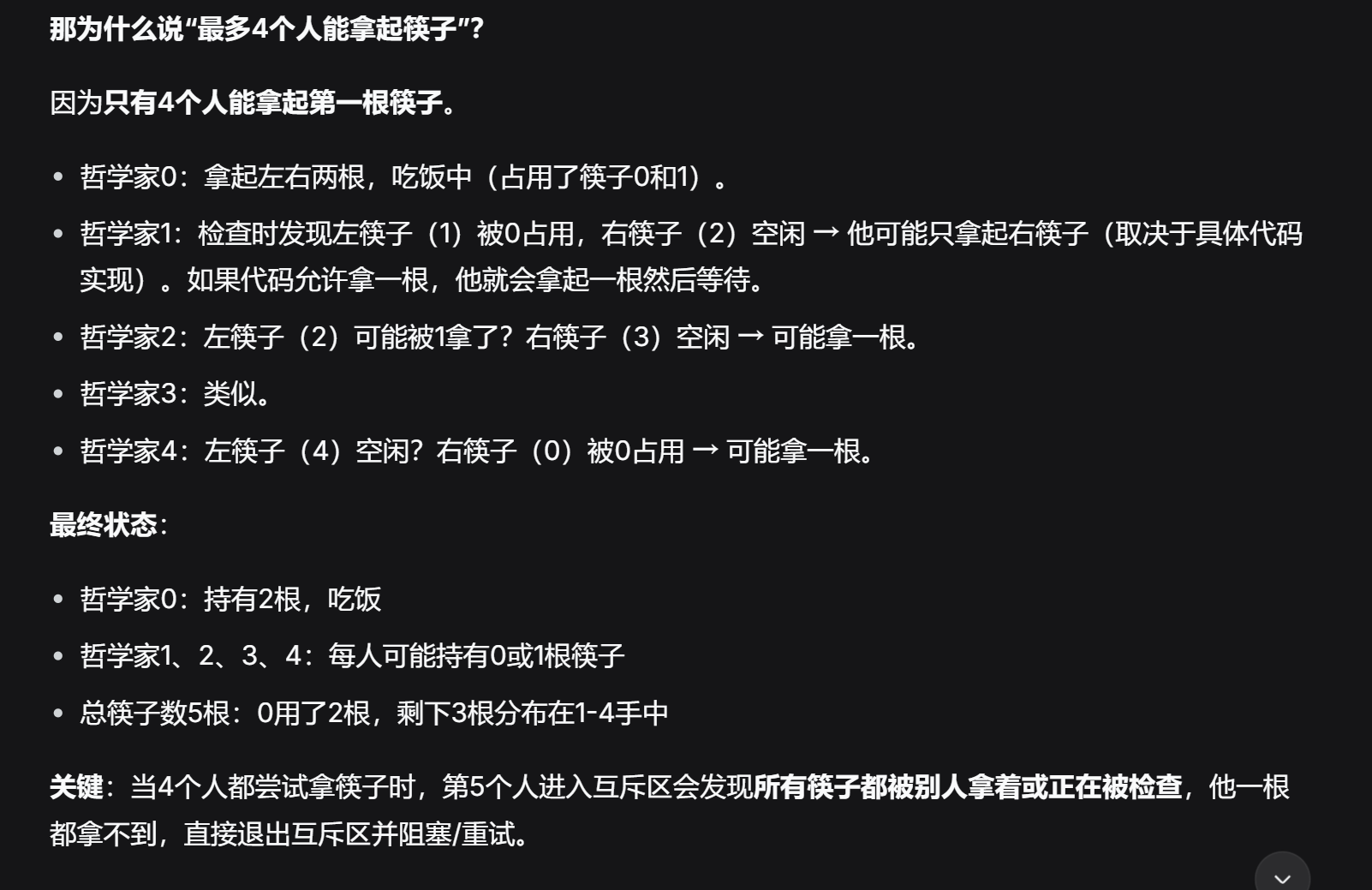
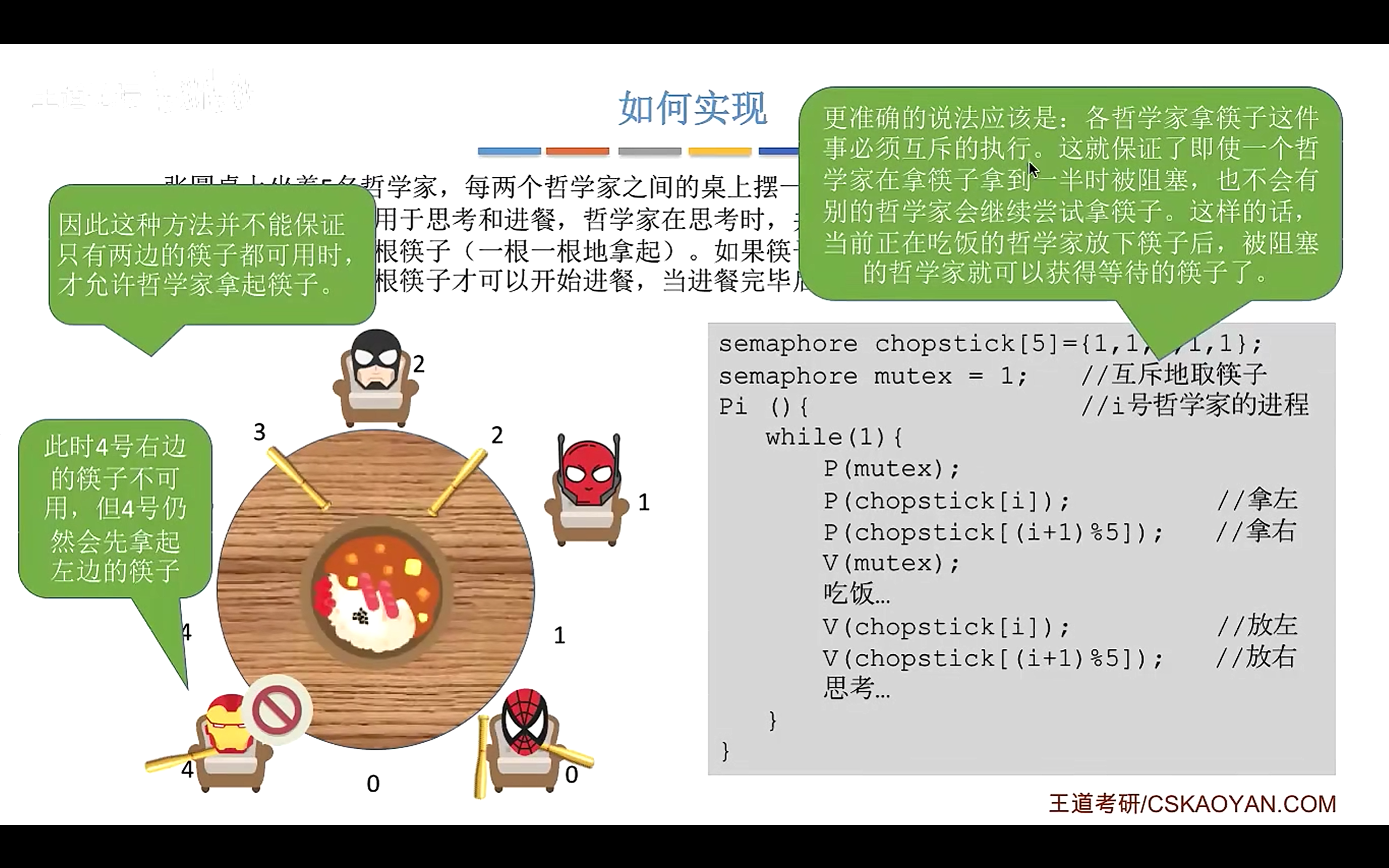
哲学家进餐问题
死锁的出现:
如何防止死锁的发生?
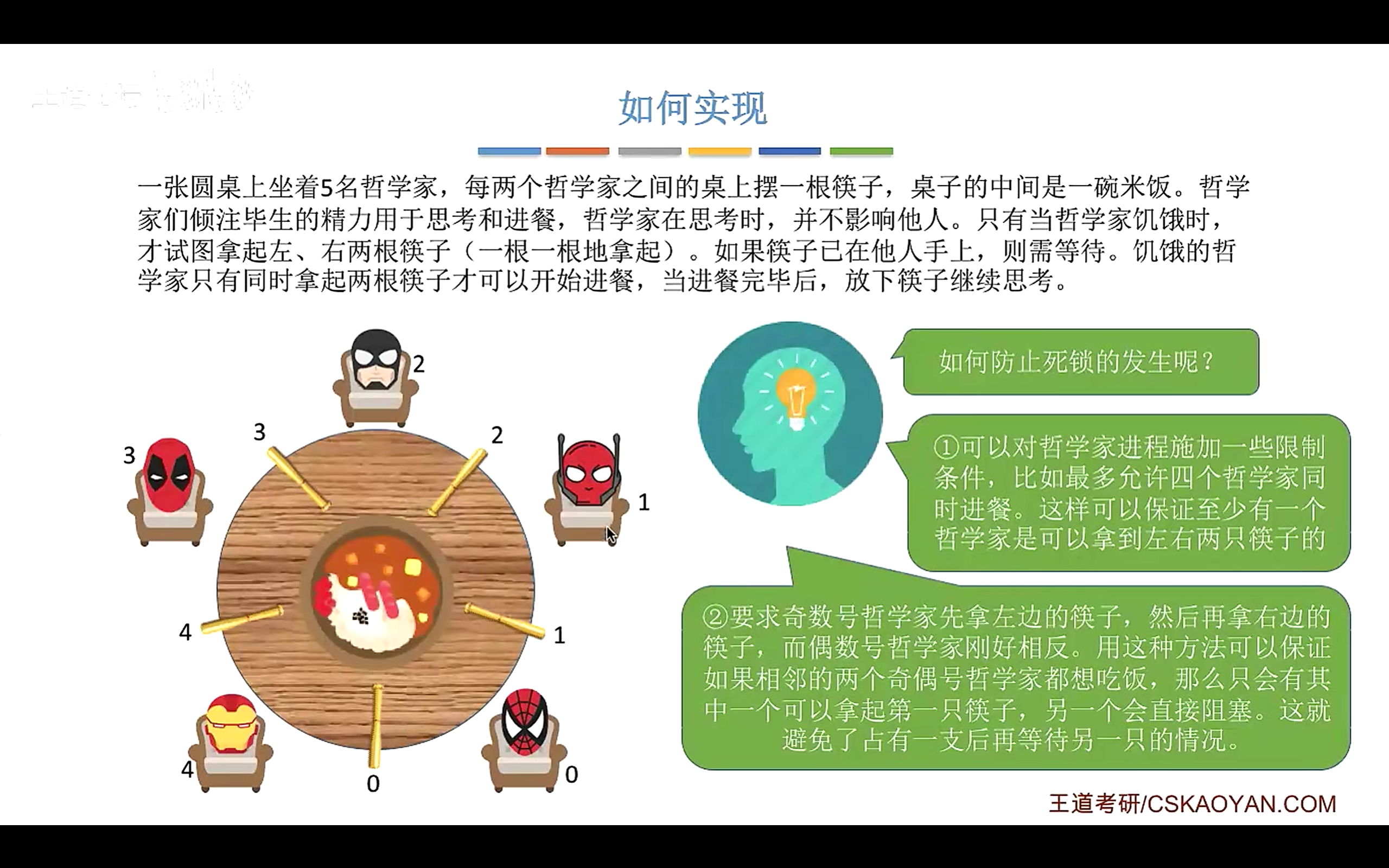
方案②:保证了不会死锁,但会引起饥饿。此时只有4个人能拿起第一根筷子。
回顾
notes
系统有n个进程:
就绪队列中进程的个数最多有n-1个。(不会出现cpu空闲的)
阻塞队列中进程的个数最多有n个(死锁)
原语的实现:
- ①屏蔽中断方法(单CPU)
- ②硬件实现